

Unmanned aerial vehicle video target tracking method based on deep learning
A target tracking and deep learning technology, applied in the field of drone video target tracking based on deep learning, can solve the problems of short video time, small number of videos, unstable drone platform, etc., and achieve high accuracy and success rate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
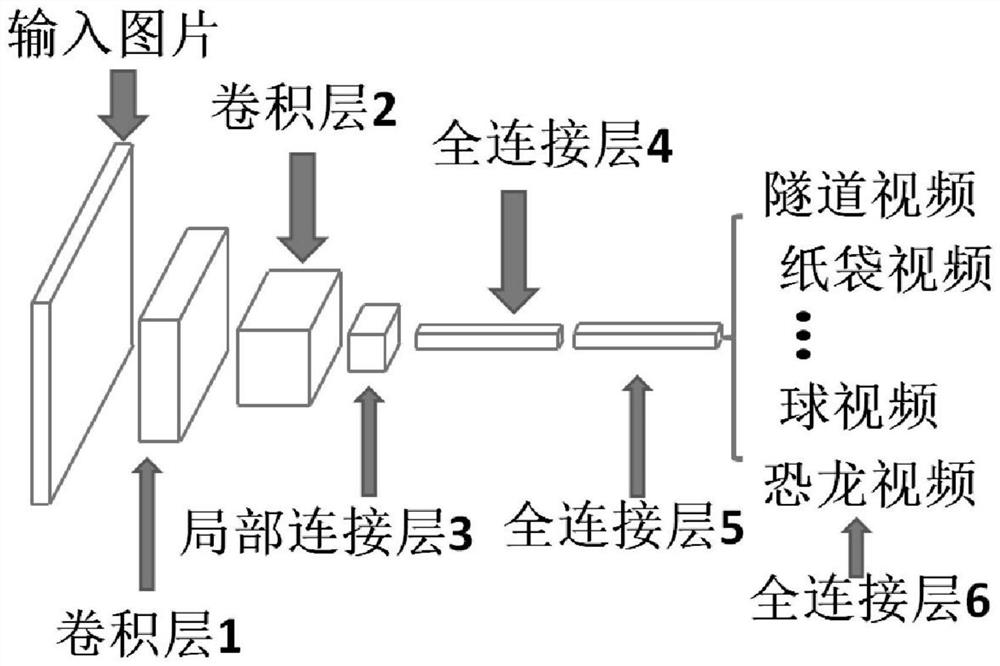
[0040] Such as figure 1 As shown, the purpose of this embodiment is firstly to enable the features of the present invention to have a good ability to describe the target, and secondly to enable the features to overcome the problem of noise interference. The approach taken is to use deep neural networks to extract features. Then use the particle filter framework to get the potential target, and then compare the distance between the target and the template to determine the target position.
[0041] Before describing the algorithm steps of the present invention, first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More