Unmanned aerial vehicle-mounted small target detection and positioning method and system under complex background
A technology for small target detection and complex background, which is applied in the field of UAV-borne small target detection and positioning methods and systems, and can solve problems such as low positioning accuracy, difficult target recognition, and poor imaging effect of long-distance targets.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
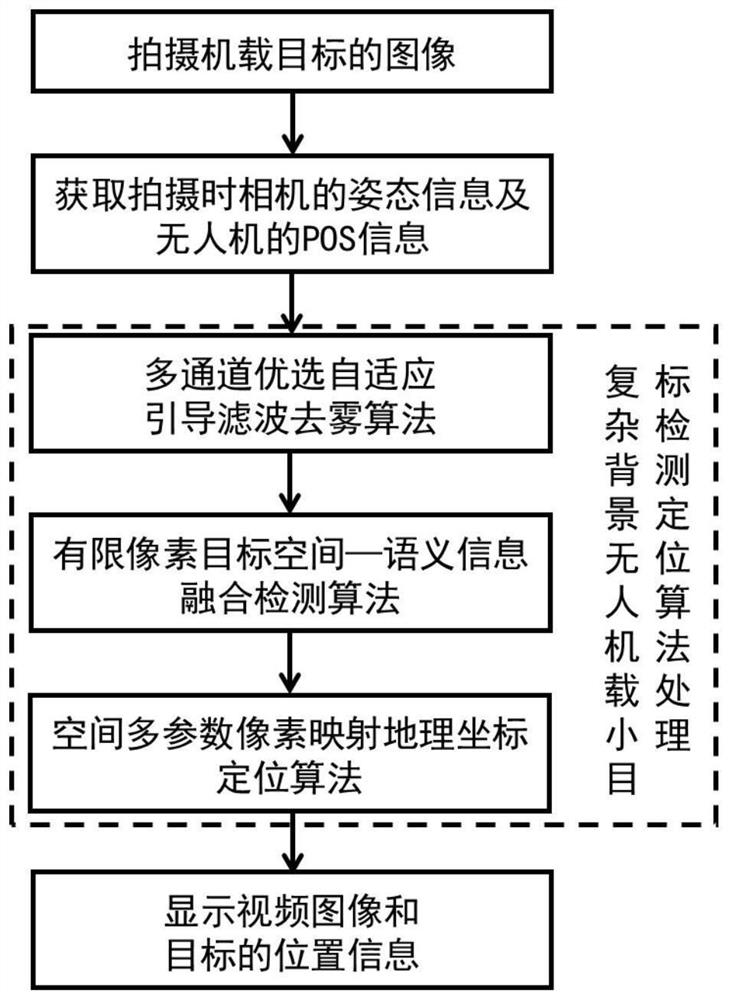
[0054]Embodiments of the present invention provide a method for detecting and locating unmanned aerial vehicle-borne small targets in complex backgrounds, such as figure 1 As shown, the method includes the following steps:
[0055] Obtain video images of small targets and attitude data of drones and gimbals;
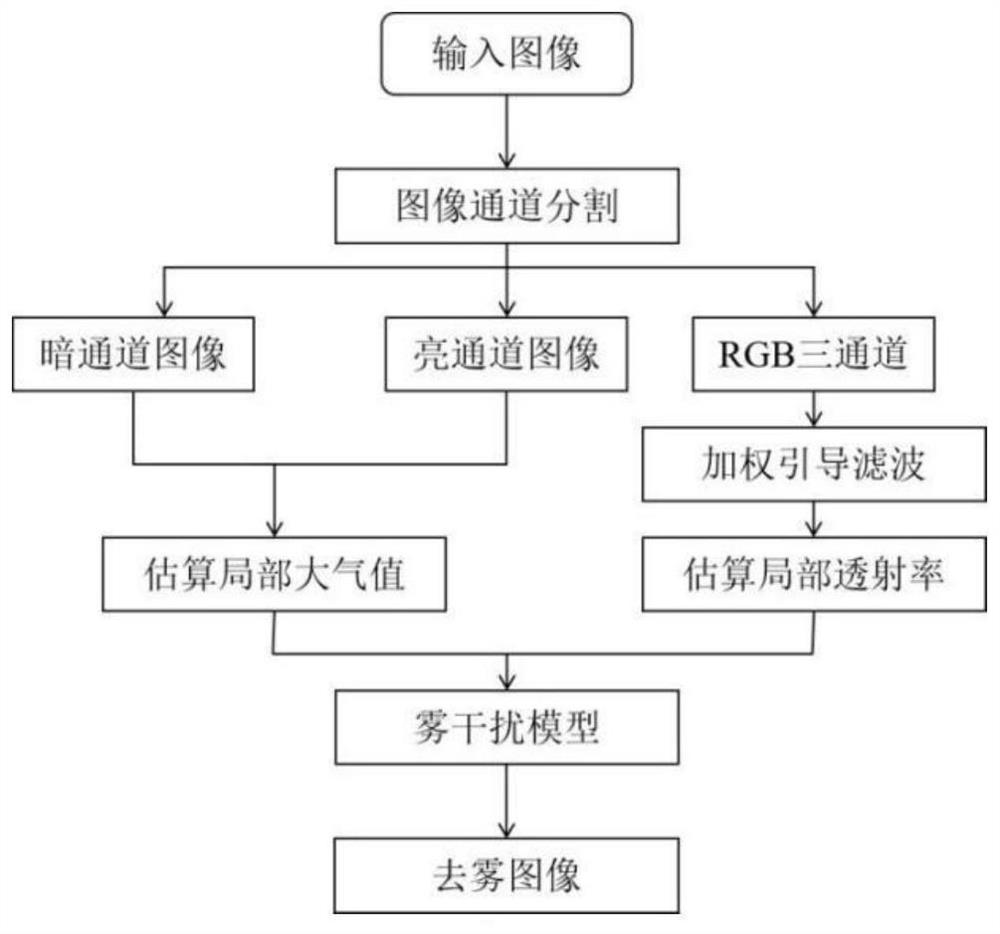
[0056] The acquired video images are preprocessed by multi-channel optimal adaptive guidance filter dehazing algorithm;
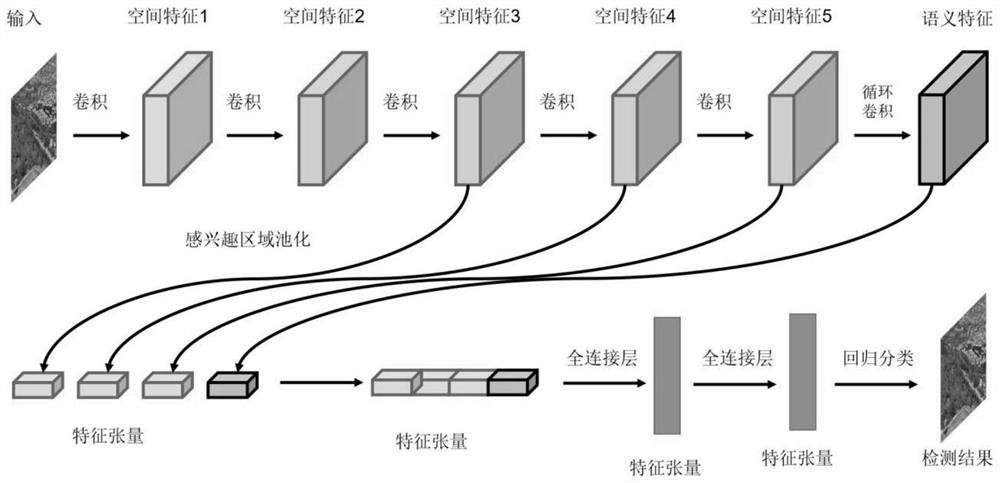
[0057] Using the limited pixel object space-semantic information fusion detection algorithm, the preprocessed video image is detected to obtain the pixel position of the small object;
[0058] Using the spatial multi-parameter pixel mapping geographic coordinate positioning algorithm, the pixel position of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More