

Local path planning method based on dynamic window method and suitable for Ackerman model robot
A technology of local path planning and dynamic window, applied in the field of robot navigation, which can solve the problems of long local paths, inability to avoid obstacles with optimal paths, and failure of robots to successfully avoid obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
[0063] A local path planning method based on the dynamic window method and suitable for Ackerman model robots, the specific steps are as follows:
[0064] Step 1) Obtain the posture of the robot and the position of the obstacle according to the sensor carried by the robot itself, and create an environment model;
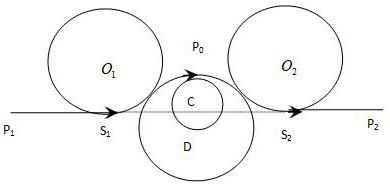
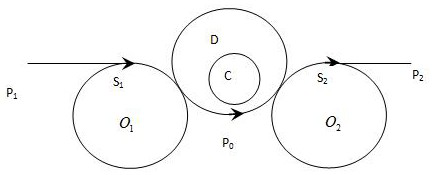
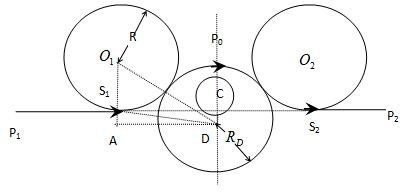
[0065] Step 2) Calculate the obstacle avoidance starting point S in the environment model 1 The coordinates of the local target point P 0 ,S 2 coordinates and directions;
[0066] Step 3) Considering kinematics constraints, safety allowable speed constraints, dynamics constraints and minimum turning radius constraints comprehensively, determine the final velocity space;
[0067] Step 4) segment the obstacle avoidance process of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More