

An underwater multi-target positioning method, terminal device and storage medium
A multi-target positioning and multi-target technology, applied in the field of underwater acoustic communication, can solve the problems that are difficult to solve directly, do not consider network node motion information, real-time application requirements, and parameter interdependence, and achieve the effect of low algorithm complexity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
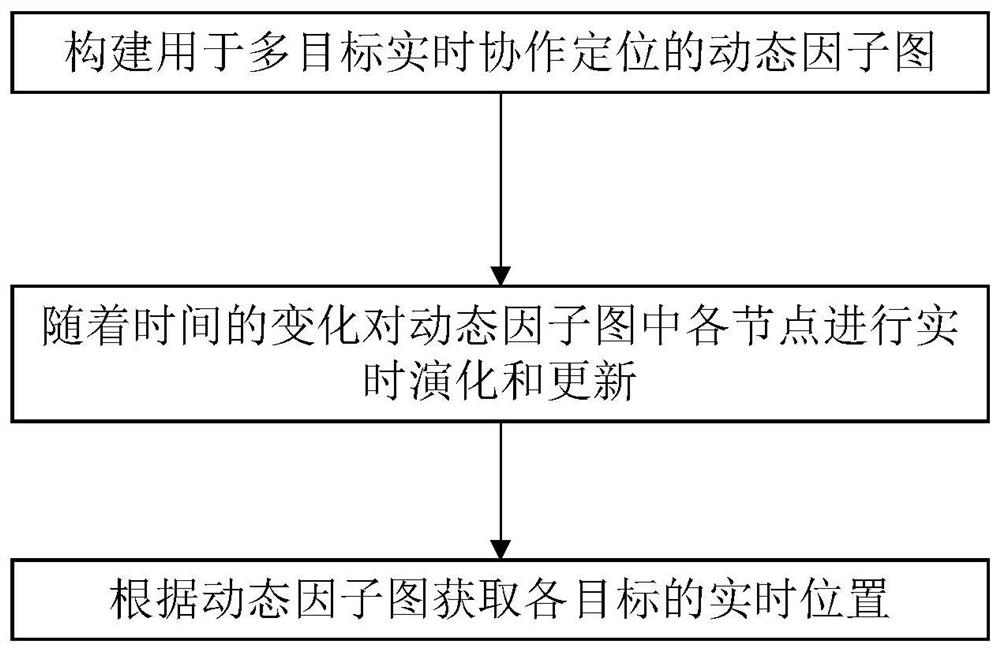
[0037] The embodiment of the present invention provides an underwater multi-target positioning method, such as figure 1 As shown, it is a flowchart of an underwater multi-target positioning method according to an embodiment of the present invention, and the method includes the following steps:
[0038] S1: Build a dynamic factor graph for multi-target real-time cooperative localization.
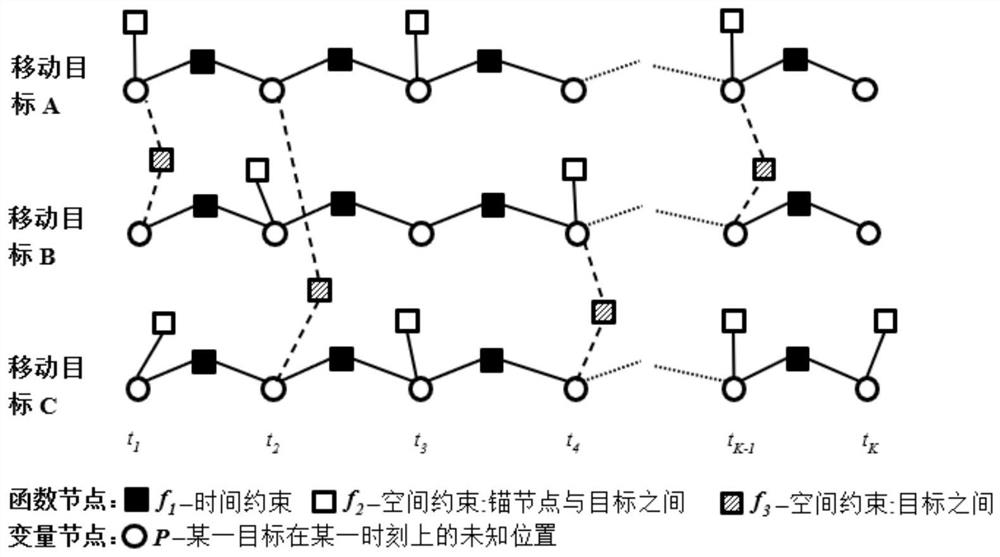
[0039] In this embodiment, the position of each target is abstracted into variable nodes, and the obtained distance measurement and speed measurement and the interdependence between the nodes are abstracted into function nodes to represent the position distribution state of each target in the network. Specifically, as figure 2 As shown (in this embodiment, three moving targets are tracked as an example), the current time t K , the dynamic factor graph includes two types of nodes: variable node p and function node f. The variable node p represents the position of the target, and the variab...
Embodiment 2
[0076] The present invention also provides an underwater multi-target positioning terminal device, comprising a memory, a processor, and a computer program stored in the memory and running on the processor, and the processor implements the computer program when the processor executes the computer program. The steps in the above method embodiment of Embodiment 1 of the present invention.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More