

An Adaptive Control Method for On-line Fast Solving Algorithm
An adaptive control and algorithm technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the optimal linear quadratic regulator cannot be applied online, and the Riccati matrix algebraic equation cannot be realized online. Solve problems, etc., to achieve the effect of improving rapid adaptability, good generalization, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
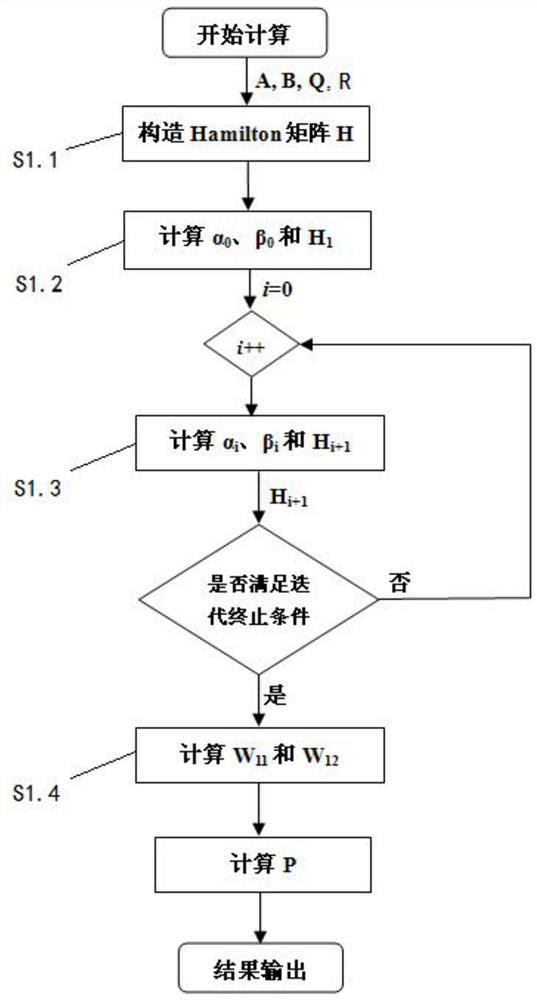
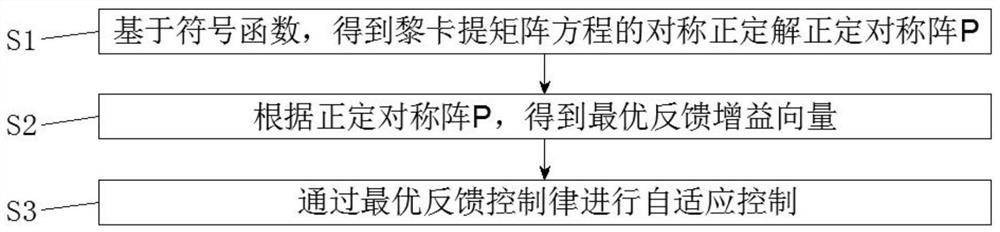
[0045] Please also refer to Figure 1 to Figure 6 , a specific implementation of an adaptive control method for an online fast solution algorithm provided by the present invention will now be described. The LQR problem can be described as: for a certain type of linear system Find the optimal feedback matrix K * , so that the form The quadratic performance metric shown is minimized, where x ∈ R n is the system state vector, A∈R ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More