

Dynamic modeling method, system and device for three-finger dexterous hand and storage medium
A technology of mechanical modeling and dynamic modeling, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention is described in further detail below in conjunction with accompanying drawing:
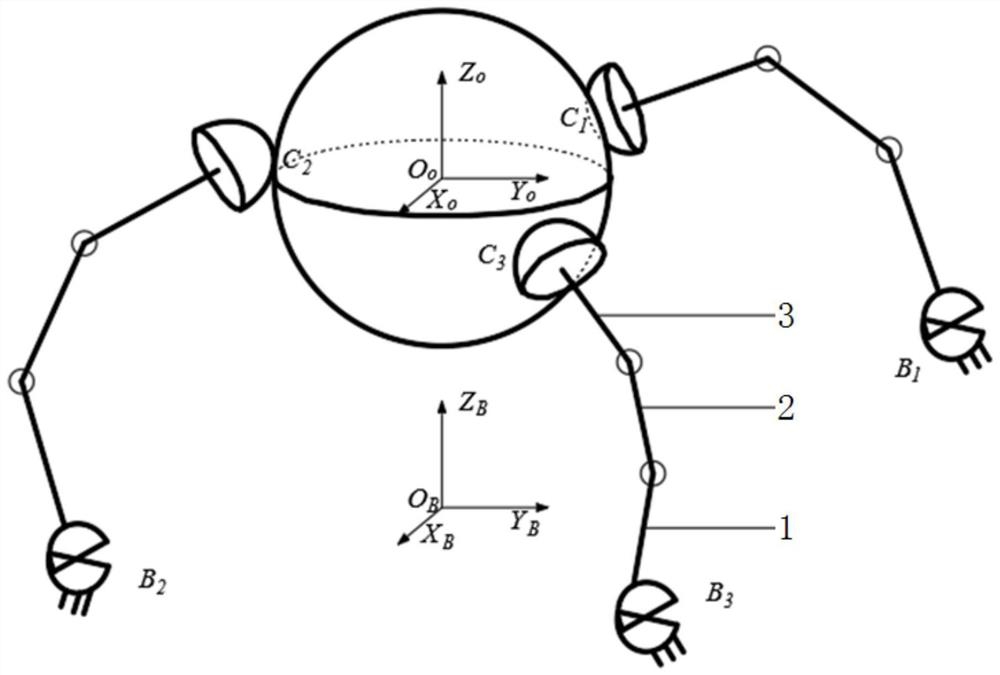
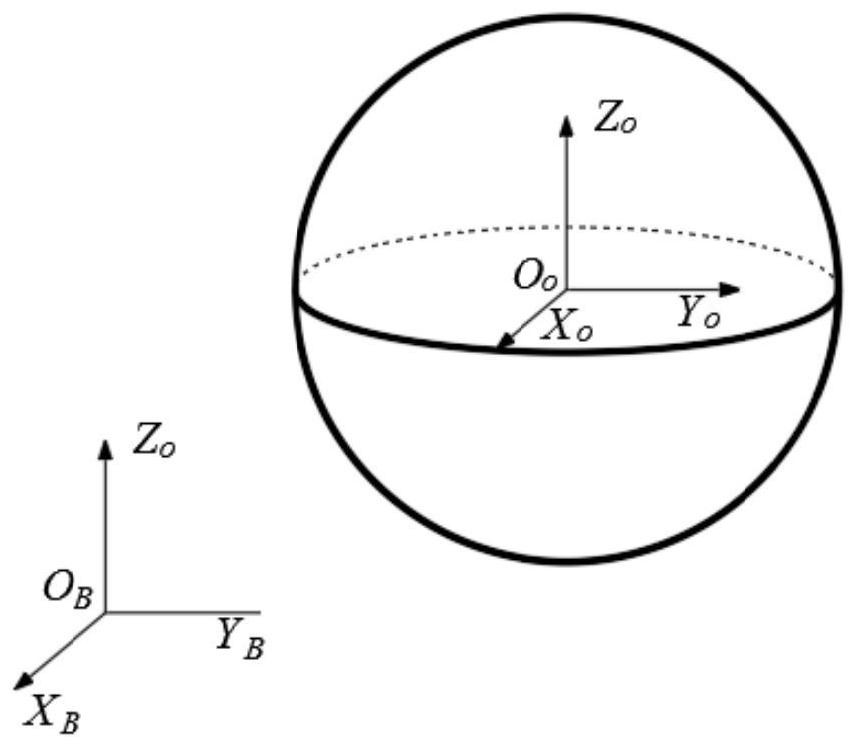
[0049] figure 1 Shown is the schematic diagram of the three-finger dexterous hand system, where O o -X o Y o Z o , O B -X B Y B Z B are the coordinate systems fixed on the palm plane and the grasping object respectively, B 1 , B 2 , B 3 Bases for the three fingers, respectively, C 1 、C 2 、C 3 are respectively the contact points of the three fingers with the grasped object. Each finger includes three phalanxes, which are proximal phalanx 1, middle phalanx 2, and distal phalanx 3 from far away from grasping objects to close to grasping objects.
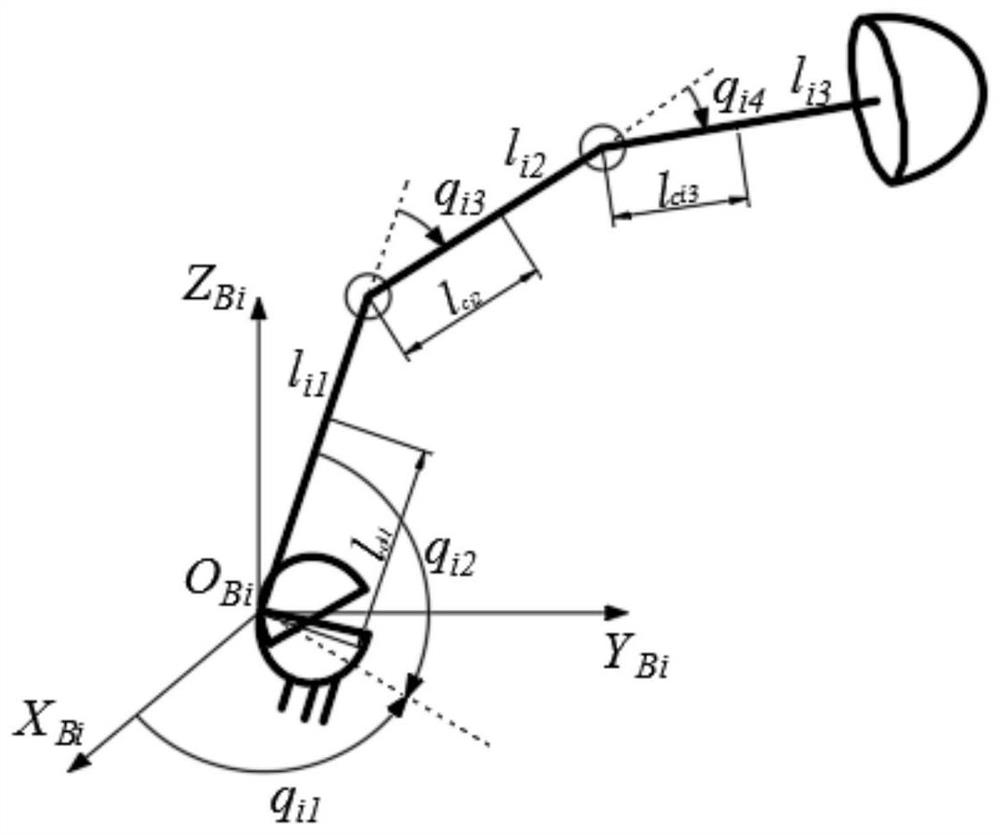
[0050] figure 2 Shown is a schematic diagram of a single-finger subsystem, where i=1, 2, 3 represent the i-th finger, O Bi -X Bi Y Bi Z Bi is the coordinate system fixed to the i-th finger base, q i1 ,q i2 ,q i3 ,q i4 Indicates the rotation angle of the four joints of the finger, l i1 , l i2 , l i3 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More