

Robot Path Planning Method Based on Genetic Algorithm and Improved Artificial Potential Field Method
An artificial potential field method and genetic algorithm technology, applied in the field of robot path planning, can solve problems such as unreachable goals, local optimum, and poor adaptability to dynamic environments, so as to avoid local minimum problems and improve quality and efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0050] The invention proposes a mobile robot path planning method based on a genetic algorithm and an improved artificial potential field method, which is used to obtain optimal or near-optimal path planning and realize global optimization of the mobile robot.
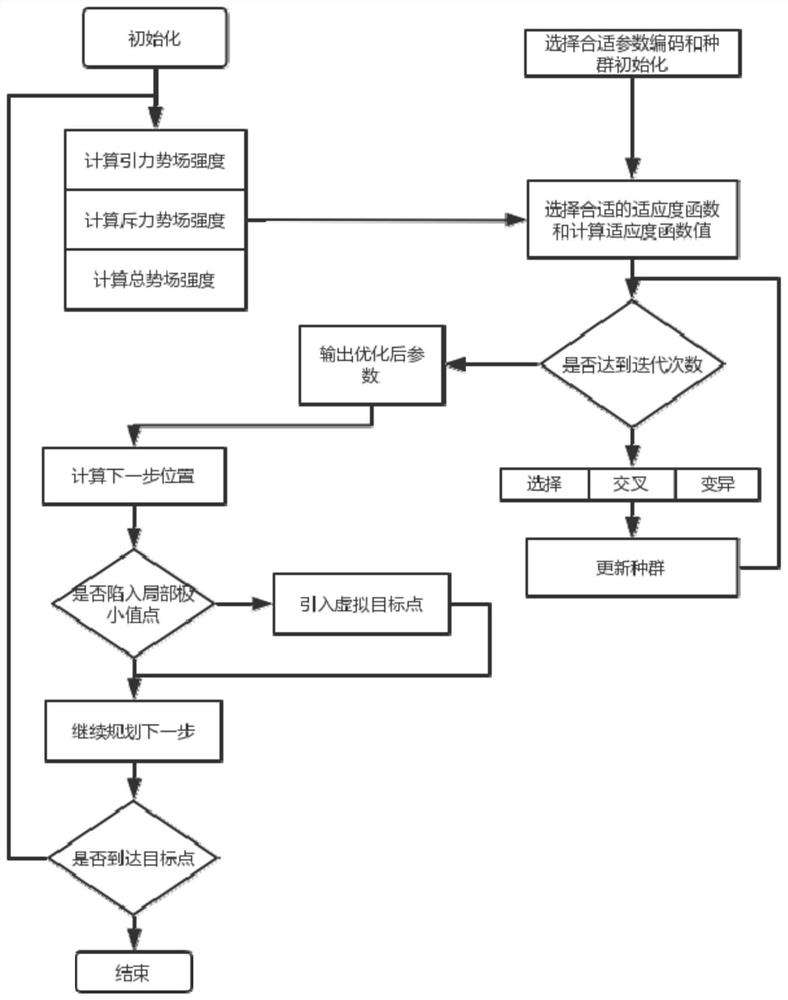
[0051] Please refer to figure 1 , figure 1 Be the flow chart of the mobile robot path planning method based on genetic algorithm and improved artificial potential field method of the present invention; The concrete steps of this method comprise as follows:
[0052] Step S1, using the artificial potential field method to model the environment of the mobile robot's working area to obtain an artificial potential field environment model, the specific process is as follows:
[0053] The artificial p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More