

UAV formation reconstruction system and method based on ant colony algorithm and artificial potential field method
A technology of artificial potential field method and ant colony algorithm, applied in the field of optimal path finding, can solve problems such as high cost of target allocation and calculation, collision, and easy collision, so as to improve global search ability, improve search accuracy, and prevent mutual collision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be described in further detail below in conjunction with the accompanying drawings.
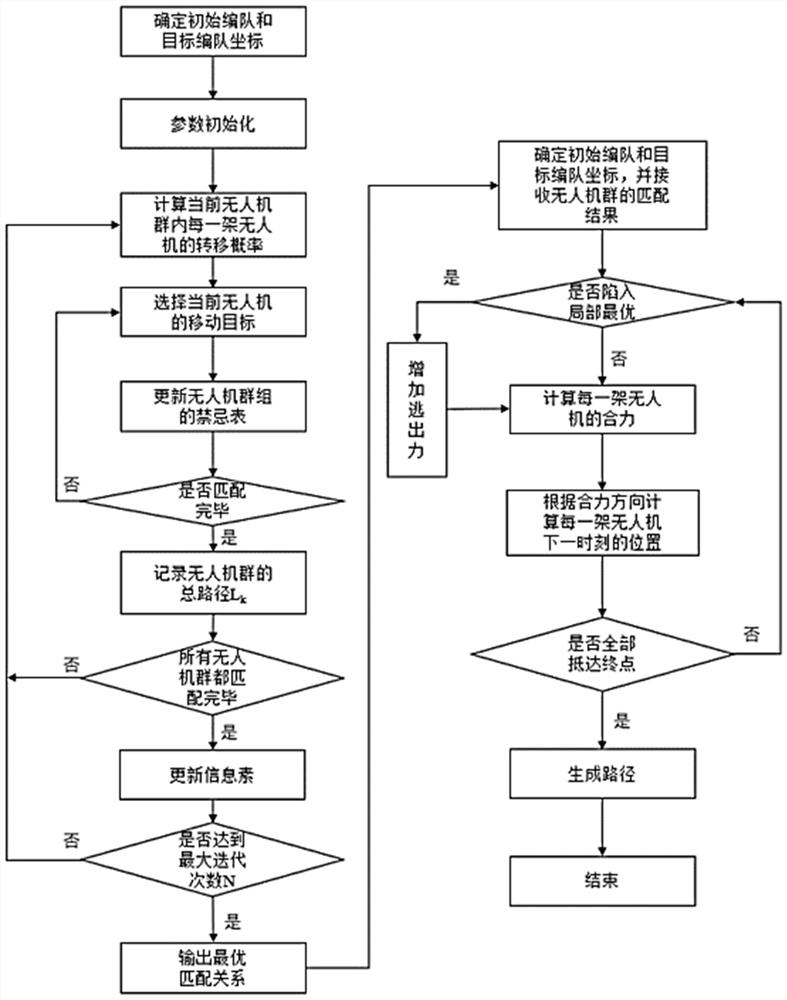
[0065] see figure 1 , the present invention provides a UAV formation reconstruction system based on ant colony algorithm and artificial potential field method, including a target allocation module, which obtains the coordinate information of the UAV group through the ground station, adopts the swarm intelligence optimization algorithm, and uses unmanned The shortest total moving path length of all UAVs in the group is the goal, and the matching relationship between the initial formation and the target formation UAVs is determined. The path planning module uses the UAV matching relationship calculated by the target allocation module, uses the path planning algorithm to calculate the movement trajectory of each UAV in the UAV group, and sends the calculated waypoint coordinates through the ground station to the drone group. The ground station module is used t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More