Target multi-quadrant motion tracking method based on 3D-UKF
A 3D-UKF and motion tracking technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as target tracking that cannot move in multiple quadrants, unscented Kalman filter failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0020] The specific implementation manner of the present invention will be described in detail below in combination with the technical scheme and accompanying drawings.
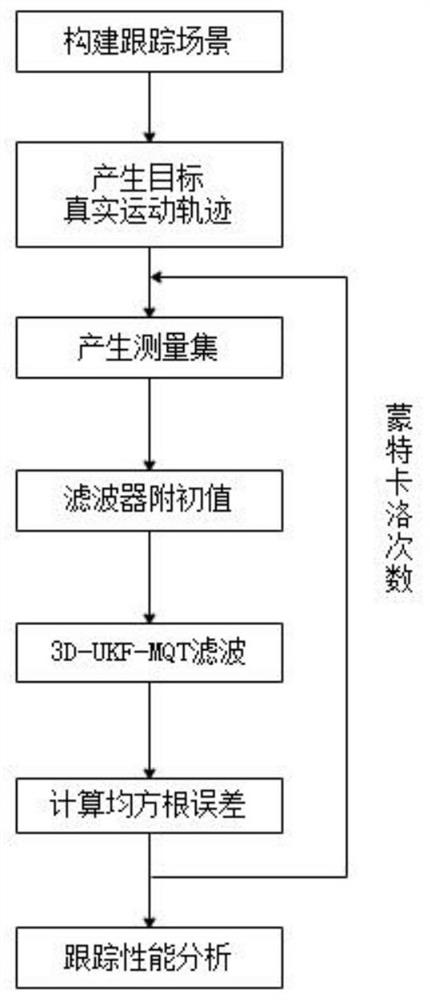
[0021] The overall flowchart of the target multi-quadrant motion tracking method based on 3D-UKF, such as figure 1 shown.
[0022] Step (1), construct a single-sensor single-target tracking scene, initialize the motion model of the target, and set the relevant parameters of the target motion, including the process noise of the target motion and the measurement noise of the sensor, specifically:
[0023] A target moves at a uniform speed in three-dimensional space, and its state can be expressed as x(k)=[p x ,v x ,p y ,v y ,p z ,v z ] T ;
[0024] where p x ,p y ,p z are respectively the position of the target in the x direction, y direction and z direction, v x ,v y ,v z are the velocities of the target in the x-direction, y-direction and z-direction, respectively.
[0025] Set the process nois...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com