

Multi-motor cooperative controller for solving time-varying problem of controlled variable coupling relationship
A coupling relationship and multi-motor technology, applied in the direction of controlling electromechanical brakes, controlling generators, controlling systems, etc., can solve the problems of uncontrollable motors and less research, and achieve the effect of improving efficiency and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
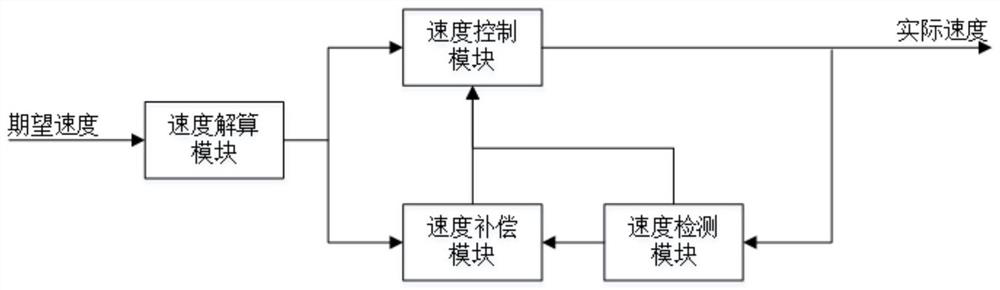
[0040] Such as figure 1 As shown, this embodiment provides a multi-motor cooperative controller aiming at the time-varying coupling relationship of control variables. The controller can use the system model to calculate the proper speed of each motor according to the expected system operating speed, and through the closed-loop The control completes the speed control of each motor, and at the same time cooperates with real-time speed compensation to realize the collaborative control of the actual speed of multiple motors. The controller includes a speed calculation module, a speed detection module, a speed control module and a speed detection module;
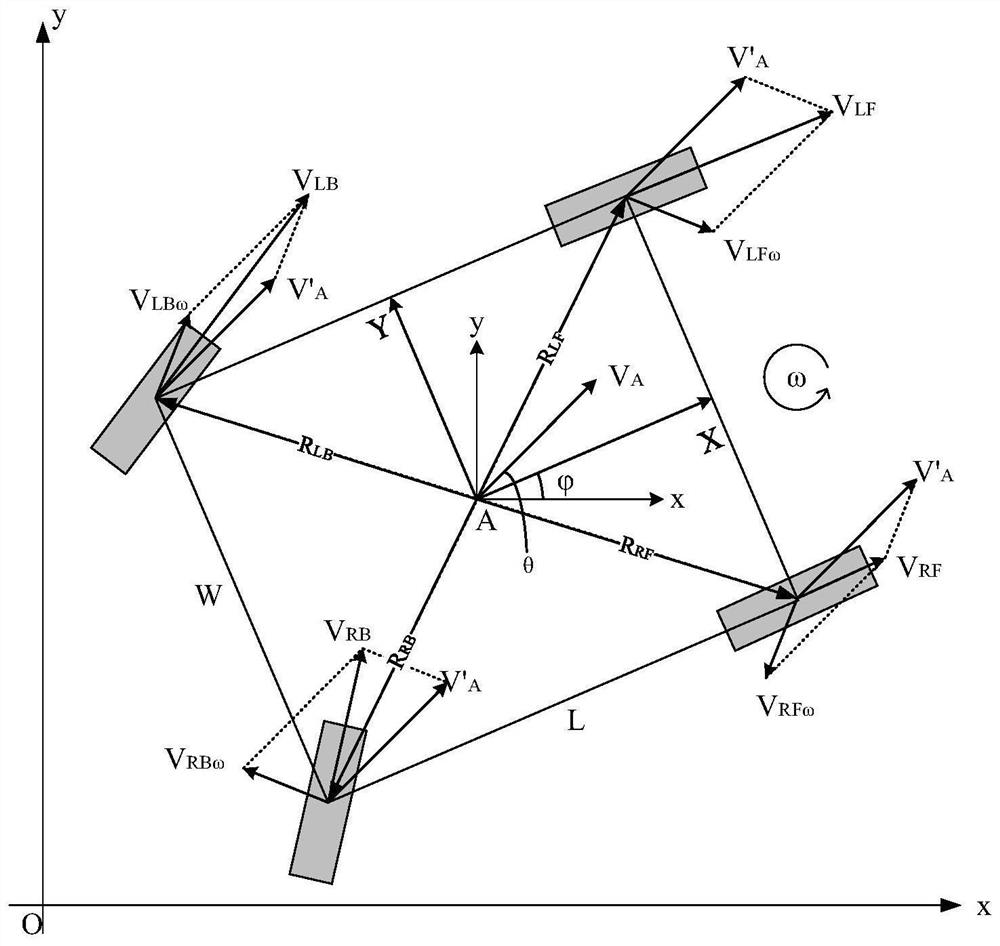
[0041] The speed calculation module receives the expected motion speed of the whole system from the outside, and performs the speed calculation work of each motor in the system according to the system model. In this implementation example, a wheeled all-drive mobile robot kinematics model is used, such as figure 2 , where L an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More