

Expected function safety analysis method for misoperation of automatic driving vehicle
A technology for autonomous driving and safety analysis, applied in special data processing applications, instruments, design optimization/simulation, etc., can solve problems such as driver's misuse of vehicle functions, traffic injuries, and intentional takeover of vehicles, so as to reduce safety problems, Improve safety and avoid accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
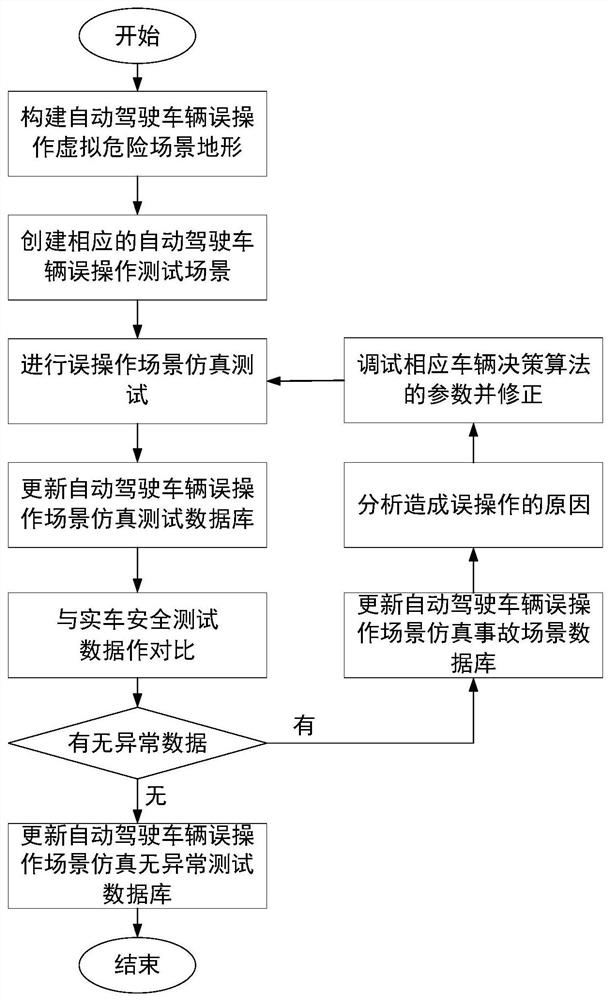
[0041] Anticipated functional safety refers to the absence of unacceptable unreasonable risks caused by insufficient design of intended functions or hazards caused by foreseeable driver misuse. The present invention mainly studies unreasonable risks caused by misoperations caused by foreseeable driver misoperations. Such as figure 1 As shown, the anticipatory functional safety analysis method for autonomous vehicle misoperation of the present invention comprises the following steps:
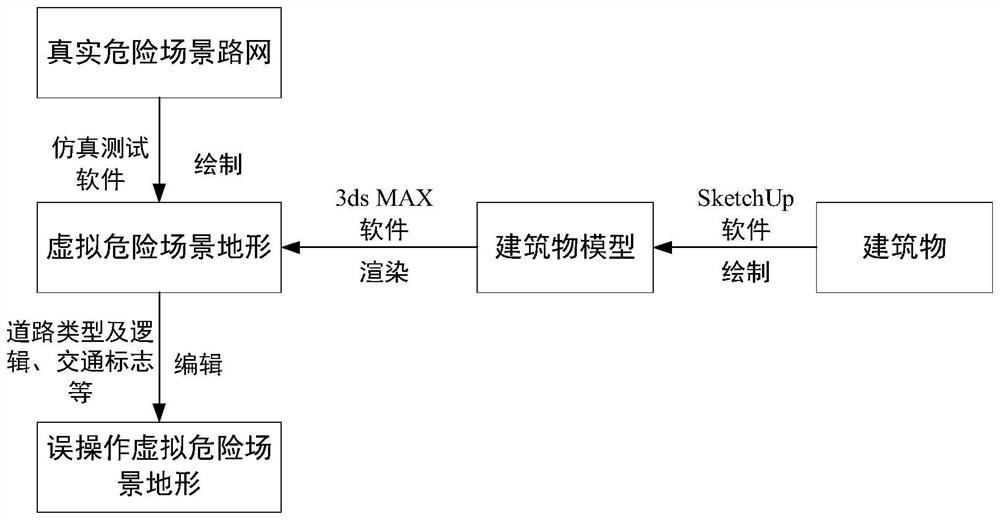
[0042] S1, Constructing a virtual dangerous scene terrain of autonomous vehicle misoperation in the simulation test software.
[0043] The complex structure of the self-driving vehicle system makes it easy for the driver to misuse the vehicle's functions. However, self-driving vehicles cannot reduce the misuse rate to zero under the influence of complex extern...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More