

Mobile mechanical arm robust control method and system based on non-linear disturbance observer
A technology of moving manipulators and interfering observers, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inaccurate modeling of dynamic models, and achieve the effect of ensuring rapid convergence and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
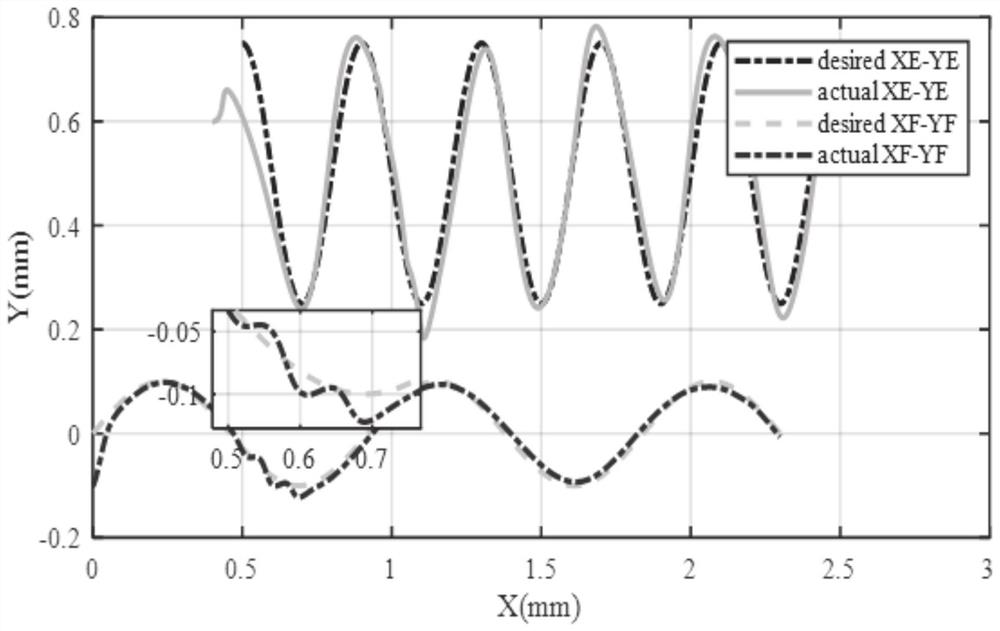
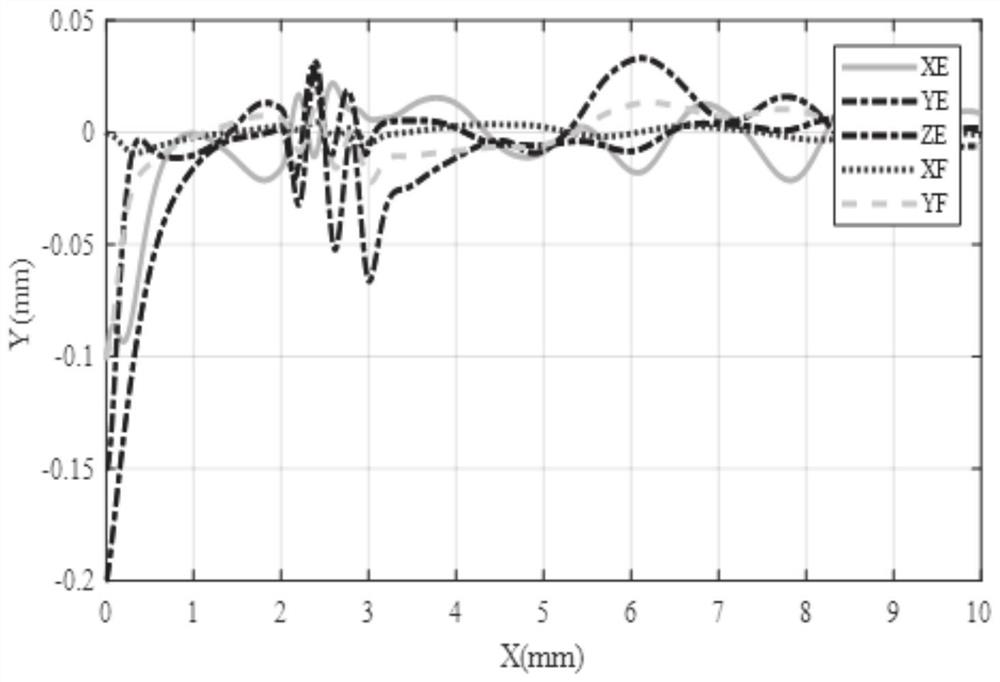
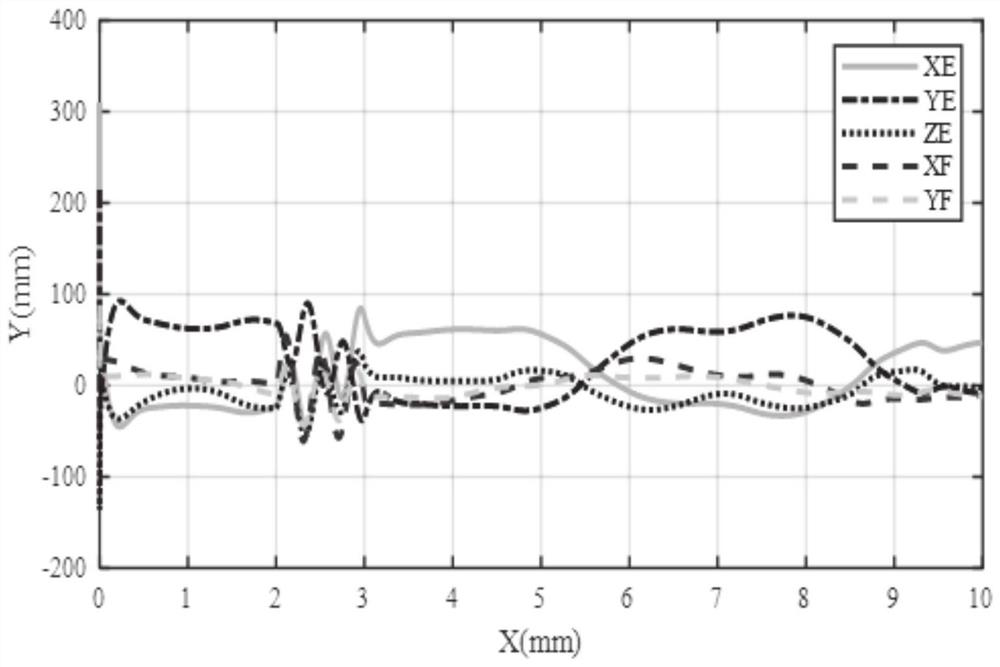
[0049]Such asfigure 1 As shown, the present disclosure provides a mobile robot arm rope control method based on a non-line interference observer, a stable trace track tracking control, a controller of a mobile robot arm based on a rowless controller of a nonlinear interference observer. Using internal and external ring control strategies, the outer ring uses an anti-stepping design controller to achieve conversion of the task space to joint space and generate the corresponding virtual speed control, and the inner ring is implemented with a PD + SMC controller with a nonlinear interference observer. The virtual speed tracking, the PD portion replaces the like in the SMC controller, solves the problem that the kinetic model cannot be precisely modeled; the switching portion in the SMC implements partial compensation to external disturbances; for burst time change unknown interference Dynamic compensation is achieved by nonlinear observer.
[0050]S1: Establishment of mobile robot arm mod...
Embodiment 2
[0126]In Example 2 of the present disclosure provides a mobile robot arm rope control system based on a non-line interference observer, including:
[0127]The data acquisition module is configured to obtain geometric data and motion status data of the mobile robot arm;
[0128]The power model build module is configured to: use the obtained data to build mobile robotic arm dynamics equations using Lagrangian principle;
[0129]The robust control module is configured to: perform internal and external ring motion control based on the resulting mobile robotic arm dynamics, the inner ring adopts a robby control based on nonlinear interference observer, and the outer ring uses an anti-stepping method to achieve the desired task space. Transformation of the trajectory to the joint space.
[0130]The working method of the system is the same as the rope control method based on the non-line interfering observer provided by the first embodiment, and details are not described herein again.
Embodiment 3
[0132]Embodiment 3 of the present disclosure provides a computer readable storage medium, which stores a program, which is performed when the program is executed, and a non-line interference observer based on the non-line interference observer according to Embodiment 1 of the present disclosure. The steps in the control method are controlled.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More