Unmanned aerial vehicle autonomous landing system and method and unmanned aerial vehicle
A technology for autonomous landing and drones, applied in the computer field, can solve the problems of missing detection targets and low heights of drones' recognition of landing points, so as to improve the initial height, strengthen autonomy and accuracy, and ensure landing accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
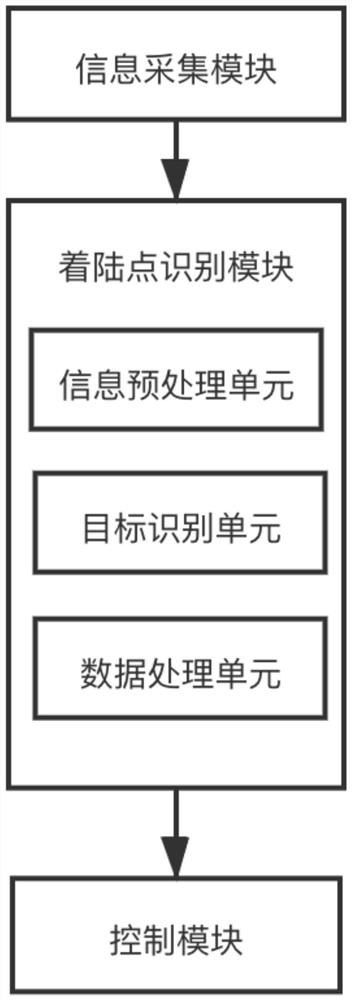
[0054] In an embodiment provided by the present invention, the landing sensor in the information collection module is two cameras, specifically a short-focus wide-angle camera and a long-focus camera, so that no The man-machine can continuously collect images of the landing beacons throughout the process for subsequent landing target recognition. The landing target point is an image marking landing sign painted on the landing point and carrying characteristic information.
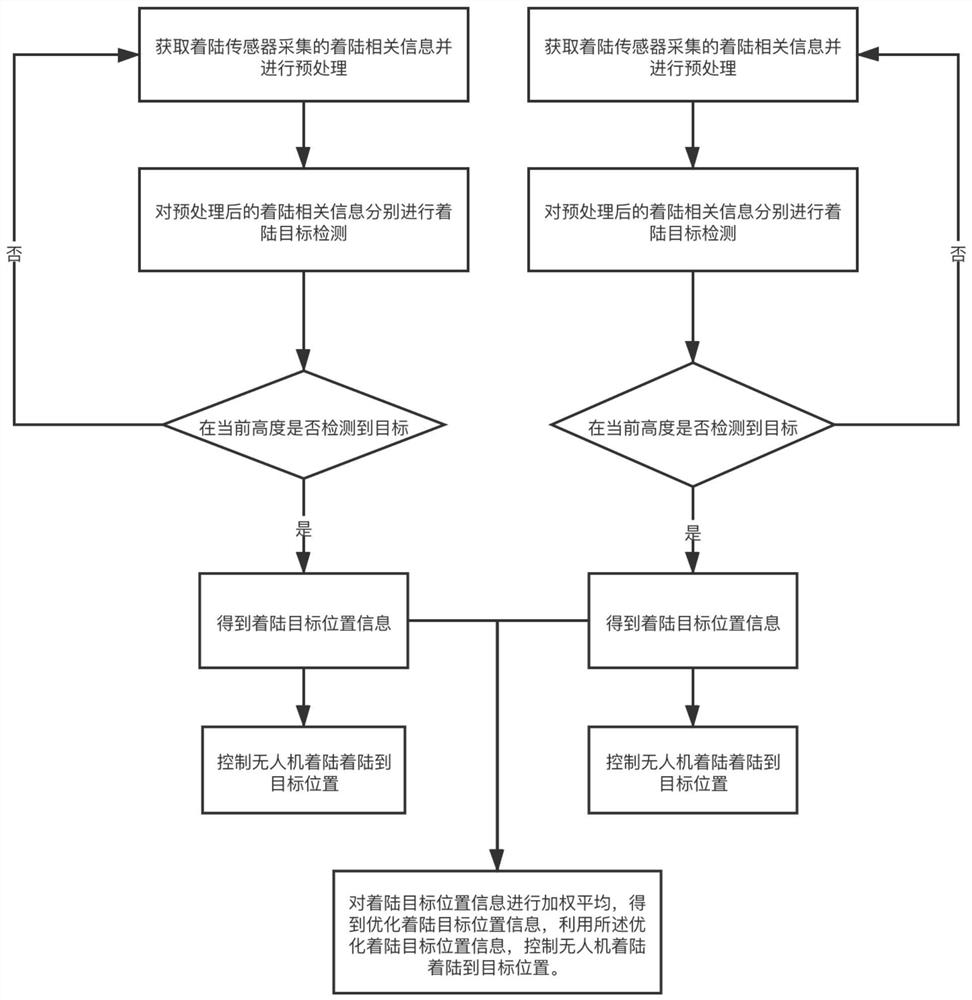
[0055] The landing point identification module is used to process the images collected by the two cameras, and identify the landing target list in the images. When the UAV is flying at a high altitude, the image output by the short-focus wide-angle camera cannot identify the landing beacon, and only the image output by the telephoto camera can be used to identify and locate the landing beacon on the ground; When the height is lowered, the images taken by the short-focus wide-angle camera and the images tak...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com