

A precise recovery method and system for power inspection drones
A recycling method and power inspection technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve problems such as large influence, unstable signal, centimeter-level error, etc., to improve speed, reduce difficulty, The effect of ensuring the landing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
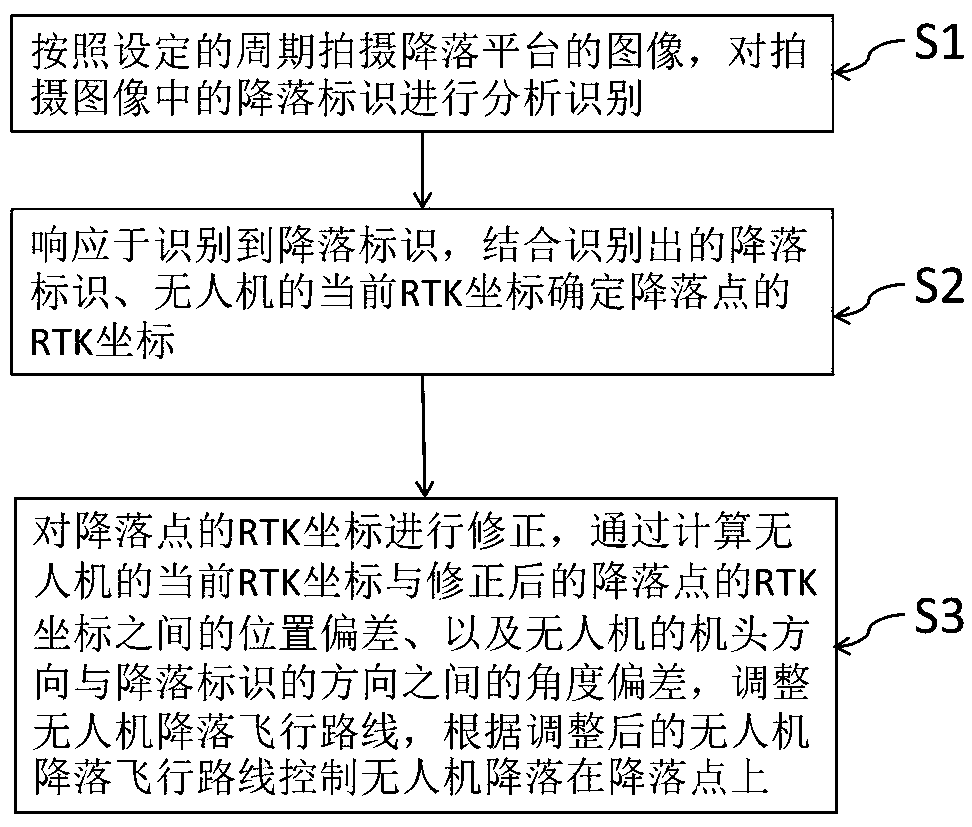
[0044] combine figure 1 , the present invention refers to a precise recovery method for electric power inspection drones. The precise recovery method includes:
[0045] S1: Take images of the landing platform according to the set period, and analyze and identify the landing signs in the captured images.
[0046] S2: In response to recognizing the landing mark, determine the RTK coordinates of the landing point in combination with the recognized landing mark and the current RTK coordinates of the drone.
[0047] S3: Correct the RTK coordinates of the landing point by calculating the position deviation between the current RTK coordinates of the drone and the corrected RTK coordinates of the landing point, and the direction of the nose of the drone and the direction of the landing sign Angle deviation, adjust the UAV landing flight route, and control the UAV to land on the landing point according to the adjusted UAV landing flight route.
[0048] combine Figure 4 , the landin...
Embodiment 2
[0109] Those of ordinary skill in the art can understand that all or part of the steps for implementing the above method embodiments can be completed by hardware related to computer programs. The aforementioned computer program can be stored in a computer-readable storage medium, and the storage medium is stored with a computer program. When the computer program is executed (such as the processor 13), the execution includes the above-mentioned precise recovery method of the electric power inspection drone. The steps of the embodiment, and the aforementioned storage medium includes: ROM, RAM, magnetic disk or optical disk and other various media that can store program codes.
Embodiment 3
[0111] The present invention also provides an embodiment of a precision recovery device for power inspection drones, including a processor 13 and a memory; wherein the memory is used to store computer programs, and the processor 13 is used to execute the computer stored in the memory A program, so that the processor executes the steps of the above embodiment of the precise recovery method for the power inspection drone. Specifically, the precise recovery device of the power inspection drone can be a smart terminal such as a remote control, a smart tablet, and a smart phone, and there is no specific limitation here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More