

A UAV Landing Method Based on Nested Square Visual Information
A visual information, square technology, applied in the direction of finding the target control, etc., can solve the problems of only seeing some landmarks, missing landmarks, and prone to horizontal deviation of drones, etc., to enhance real-time performance and solve relative poses Hysteresis, the effect of improving landing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
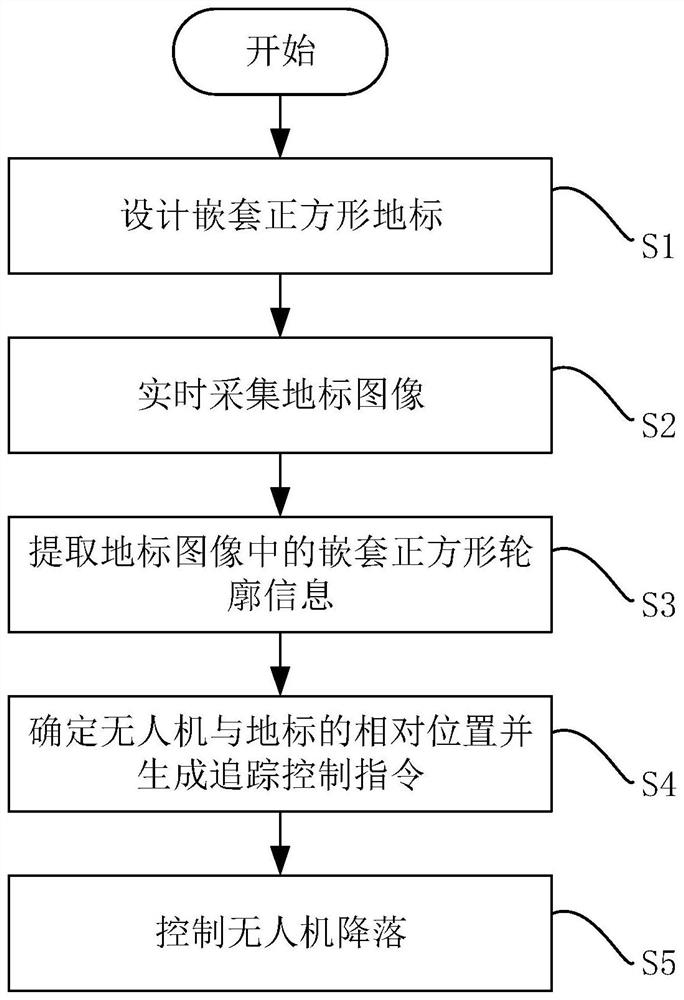
[0048] Such as figure 1 As shown, a UAV landing method based on nested square visual information, the method includes the following steps:
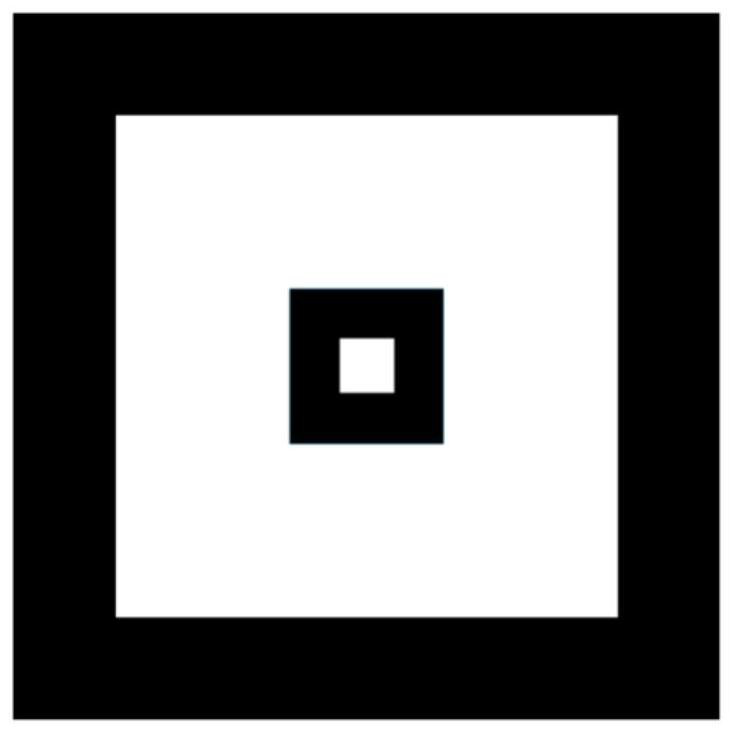
[0049] S1: Design nested square landmarks;
[0050] S2: Landmark images are collected in real time during the landing process of the drone;
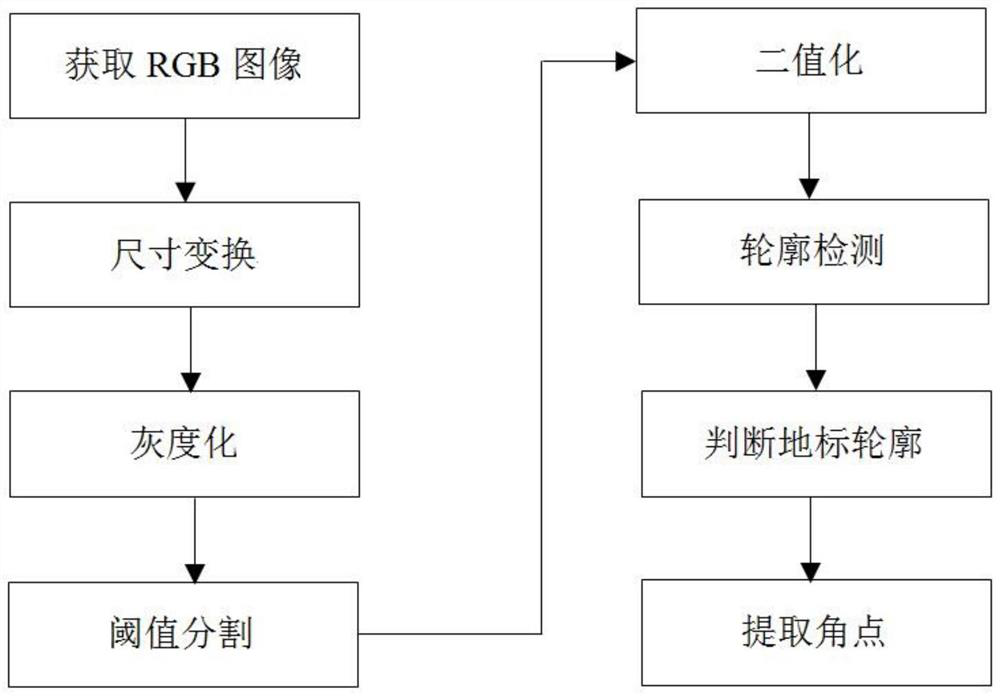
[0051] S3: Extract the nested square contour information in the landmark image;
[0052] S4: Determine the relative position of the UAV and the landmark according to the nested square outline information and generate a tracking control command;
[0053] S5: Control the UAV to land according to the tracking control instruction.
[0054] The nested square landmarks in step S1 are specifically: a multi-layered square pattern with nested settings and coincident center points, the area of the nested square patterns decreases one by one from the outside to the inside, and the distance between each square pattern is not equal.
[0055] Specifically in step S3:
[0056] When the flying height of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More