

Local two-degree-of-freedom rigid-flexible coupling bionic robot waist joint
A technology of bionic robot and degree of freedom, applied in the field of humanoid robot, can solve problems such as poor flexibility of waist joints and lack of force perception ability, achieve high fidelity, good market application prospects, and increase mechanism flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
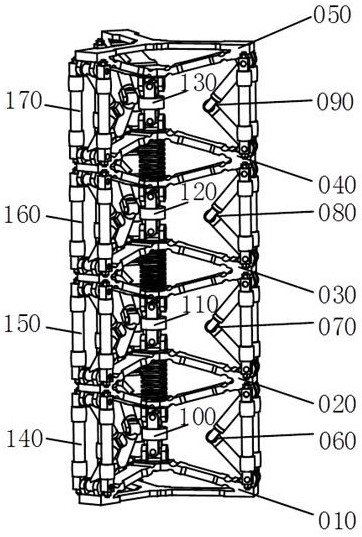
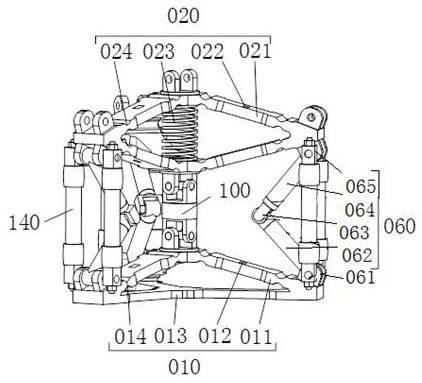
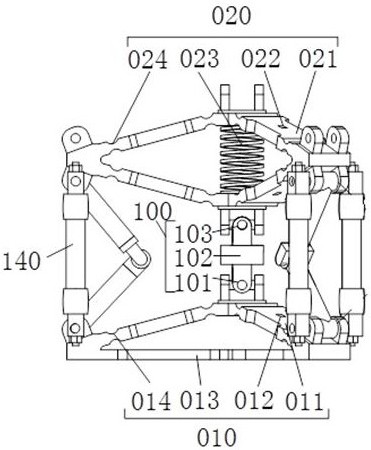
[0021] A local two-degree-of-freedom rigid-flexible coupling bionic robot waist joint, including four parallel units superimposed from bottom to top, and the four parallel units are respectively the first parallel unit, the second parallel unit, the third parallel unit, For the fourth parallel unit, the structure of the first parallel mechanism unit is the same as that of the fourth parallel mechanism unit, and the structure of the second parallel mechanism unit is the same as that of the third parallel mechanism unit; a flexible shared platform is set between each adjacent two of the four parallel units, respectively The flexible shared platform a, the flexible shared platform b, and the flexible shared platform c are provided with a flexible fixed platform 010 at the bottom of the first parallel unit, and the flexible fixed platform 010 includes three force-sensing branches a, and one end of the three force-sensed branches a passes through The flexible hinges are connected to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More