

Industrial human-computer interaction system and method based on vision and inertial navigation positioning
An inertial positioning and human-machine technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as space constraints, inability to human-computer interaction to get rid of space constraints and walk with people, and complex identification and image processing processes to reduce equipment. cost, improve system security, and improve the effect of space utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be described in detail below in conjunction with the accompanying drawings.
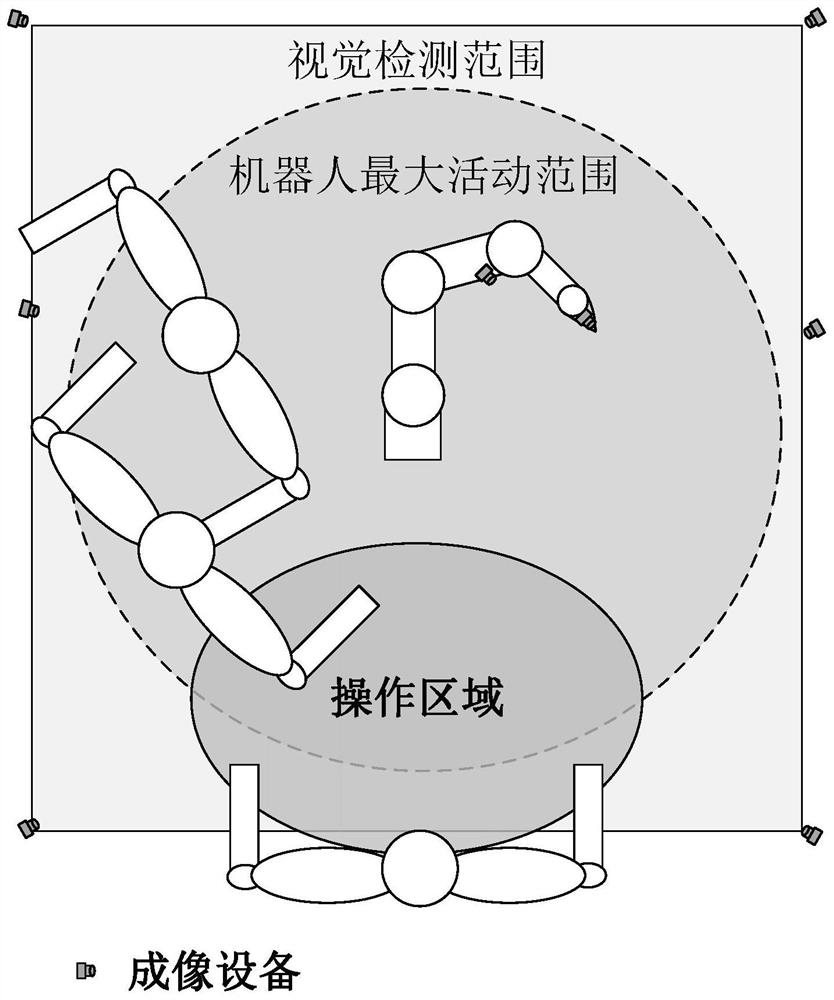
[0056] The industrial human-computer interaction system based on vision and inertial navigation positioning includes controlled equipment, scene image acquisition system and auxiliary positioning equipment worn on the operator's arm, palm and fingertips.
[0057] In this system, the scenes of human-computer interaction can be divided into two categories: non-interactive workspace and interactive workspace. During the working process in the interactive workspace, the operator will have direct or indirect contact with the robotic arm. The main problem that threatens people and safety in the process of human-computer interaction is the collision between the operator and the controlled equipment. The main task of the system during operation is to predict the impending collision. For two different scenarios, this system divides the problem of ensuring human-machine safet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More