Joint control method and system for unmanned aerial vehicle and follow-up trolley
A technology for drones and cars, applied in control/regulation systems, non-electric variable control, vehicle position/route/height control, etc., can solve problems such as poor adaptability, complex construction, and the inability of drones to maintain uniform motion. To achieve the effect of constant pipeline tension and uniform movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
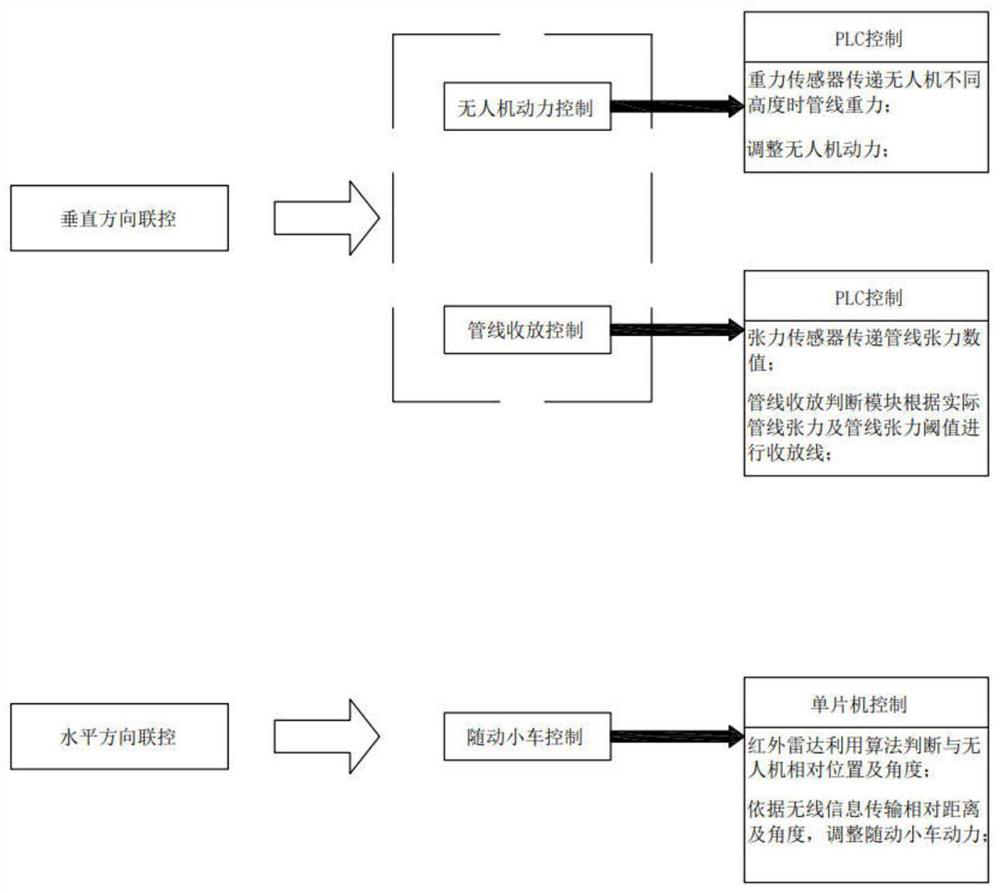
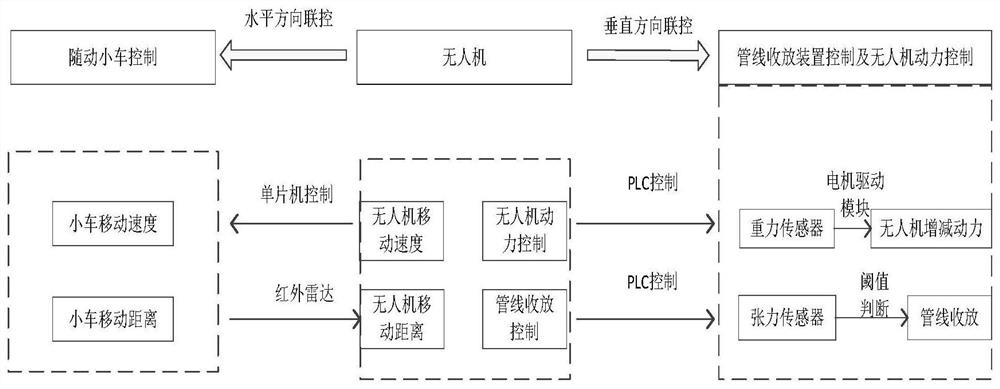
[0033] refer to figure 1 , according to the embodiment of the present invention, the joint control method of the UAV and the follow-up car is used for the UAV spraying device with the follow-up car, including the simultaneous vertical direction joint control process and the horizontal direction joint control process, wherein The vertical joint control process includes the following steps:
[0034] Step 100: the gravity sensor measures the gravity of the pipeline loaded by the drone, and the tension sensor measures the pipeline tension value;
[0035] Step 110: Control the retraction and release of the pipeline by the pipeline retraction device according to the value of the pipeline tension, so as to keep the pipeline in a tensioned state;
[0036] Step 120: Adjust the power output of the UAV according to the change of pipeline gravity, so th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com