

Multi-unmanned aerial vehicle cooperative wide-area moving target searching method based on hybrid mechanism
A multi-UAV, search method technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve the problems of low search efficiency, long search task time, wide range of task areas, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
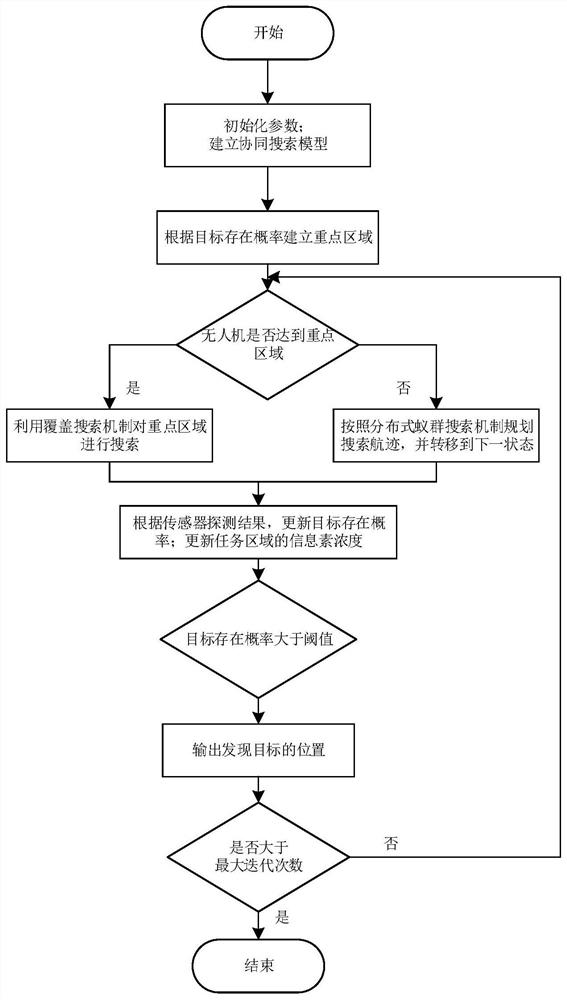
[0047] In order to verify the feasibility and beneficial effects of a multi-UAV cooperative wide-area moving target search method based on a hybrid mechanism disclosed in the present invention, the technical solution of the present invention is described clearly and in detail in a case below, and the flow of the method Figure such as figure 1 shown.
[0048] This example discloses a multi-UAV cooperative wide-area moving target search method based on a hybrid mechanism, including the following steps:
[0049] Step 1: Initialize parameters and establish multi-UAV collaborative search model.
[0050] 1) Initialization parameters include: task area length L, width W; sensor detection probability P D and the range R; the initial position of the UAV; the initial existence probability of the target p i (x n ,x n ,t 0 ); Ant colony algorithm parameters: pheromone concentration factor α and coverage heuristic factor β. pheromone concentration κ i (x n ,y n ,t 0 );
[0051]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More