

A kind of imitation leather shrimp underwater robot
A technology of underwater robots and control mechanisms, which is applied to underwater operation equipment, transportation and packaging, ships, etc., to achieve the effects of low cost, favorable underwater movement and detection, and strong replaceability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings, but the present invention is not limited to the following examples.
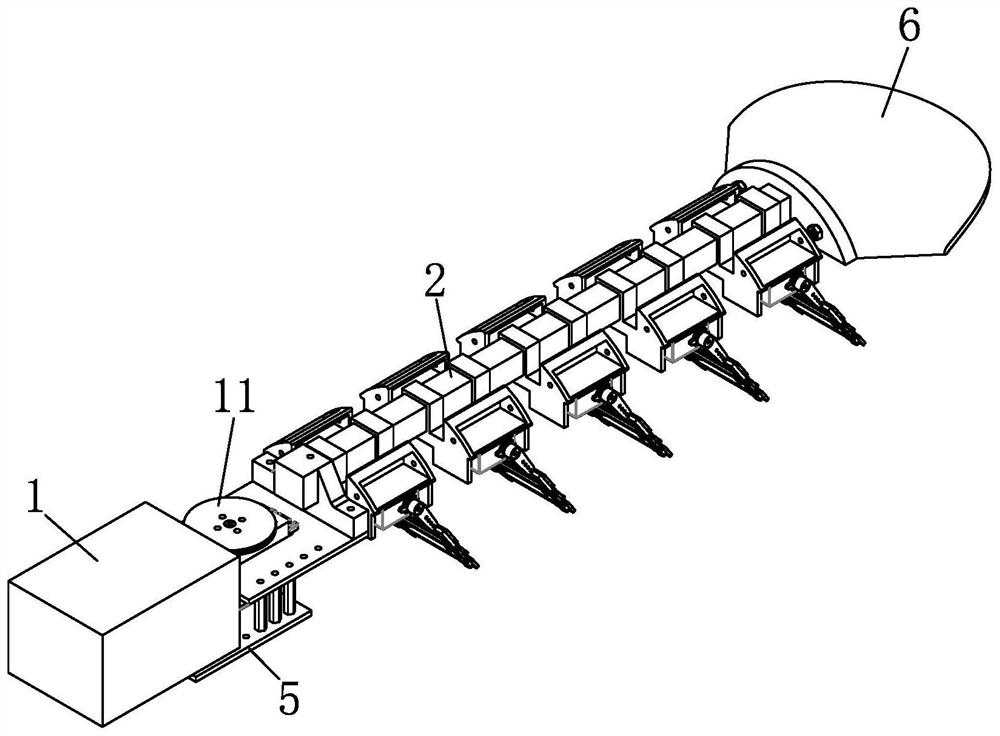
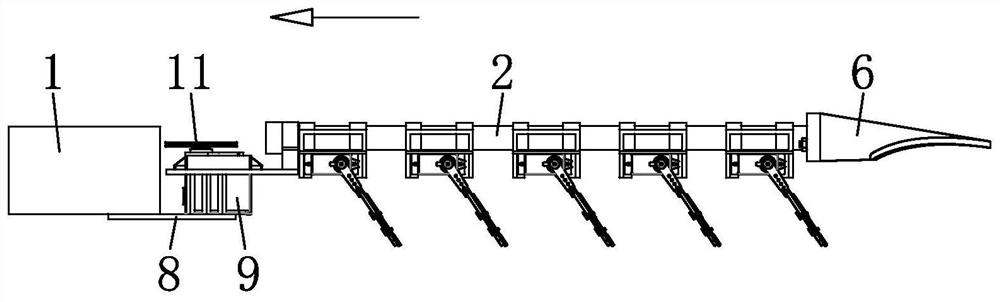
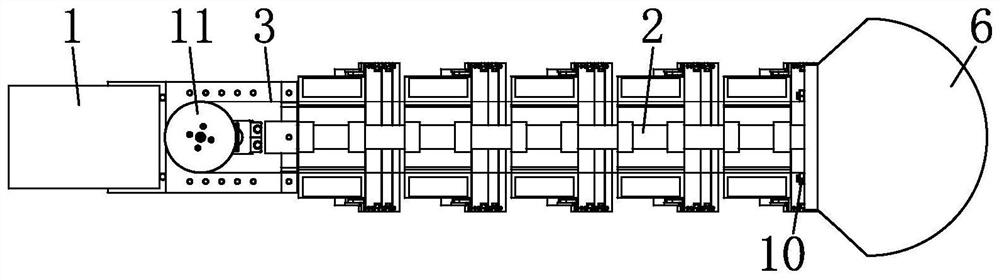
[0024] Such as figure 1 Shown, a kind of imitation skin shrimp underwater robot comprises head, tail 6, flexible spine 2, several kinematic mechanisms, steering mechanism, control mechanism. The flexible spine is made of rubber. The two ends of the flexible spine are respectively fixed to the head and the tail, the control mechanism is set on the head, the motion mechanism is arranged along the flexible spine to drive the robot forward, and the steering mechanism is used to drive the flexible spine to bend to realize the robot turning.
[0025] The head includes a connecting base 5 and a housing 1 fixed on the connecting base. The housing is a closed housing, and the control mechanism (omitted in the figure) is arranged in the housing.
[0026] Such as Image 6 As shown, the motion mechanism include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More