

Distribution network hot-line work robot for three-phase line fire connection and pose control method therefor
A technology of live work and control method, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., which can solve the problems of low operating efficiency and high accident rate of personnel
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
[0028] In the present invention, unless otherwise specified, the orientation words included in the term such as "up, down, left, right, front, back, inside and outside" only represent the orientation of the term in the normal use state, or the common name understood by those skilled in the art. , and should not be construed as a limitation of this term.
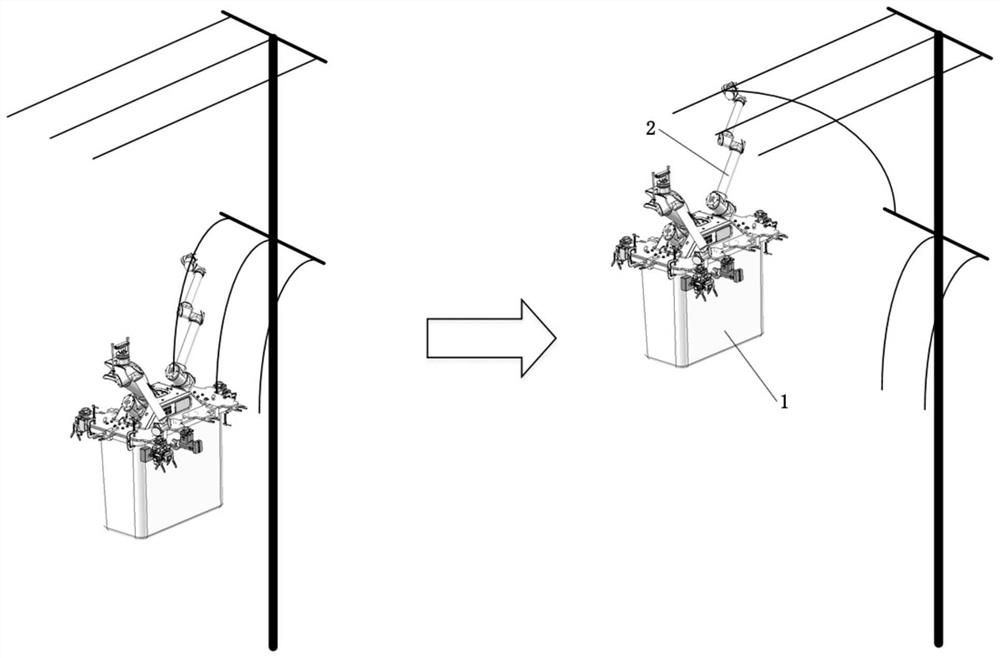
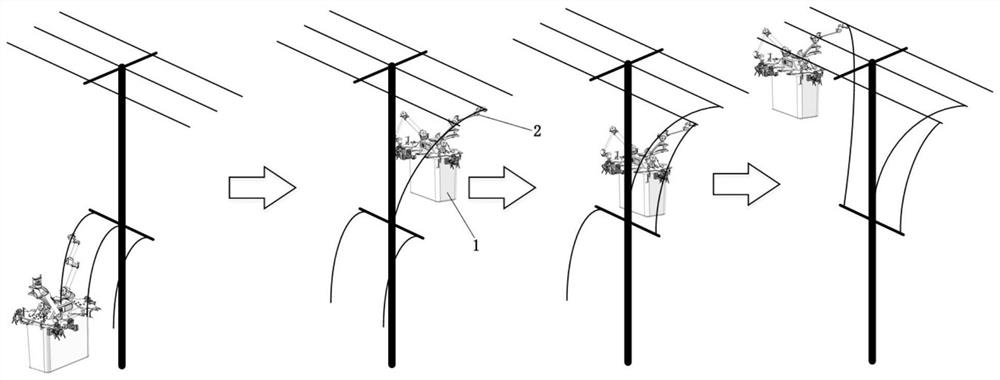
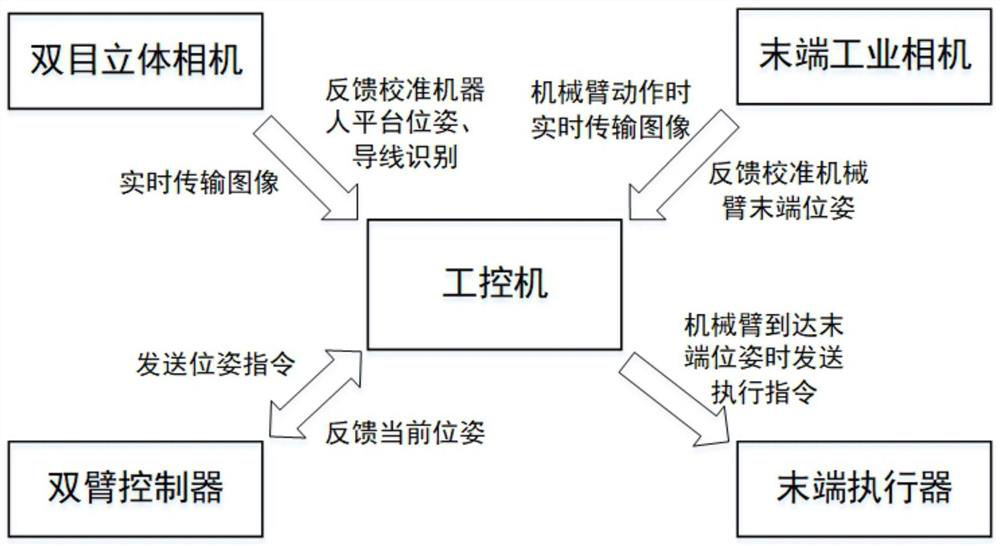
[0029] see Figure 1-3 As shown in the fire contact posture and control system, the posture control method of the distribution network live working robot 1 includes:
[0030] For the parallel connection line, the distribution network live working robot 1 is moved into place by the hydraulic arm truck, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More