

Positioning method and system based on error compensation, terminal equipment and readable storage medium
A technology of error compensation and positioning method, which is applied in the direction of service based on location information, service based on specific environment, positioning, etc., and can solve problems such as signal propagation distortion and large positioning error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
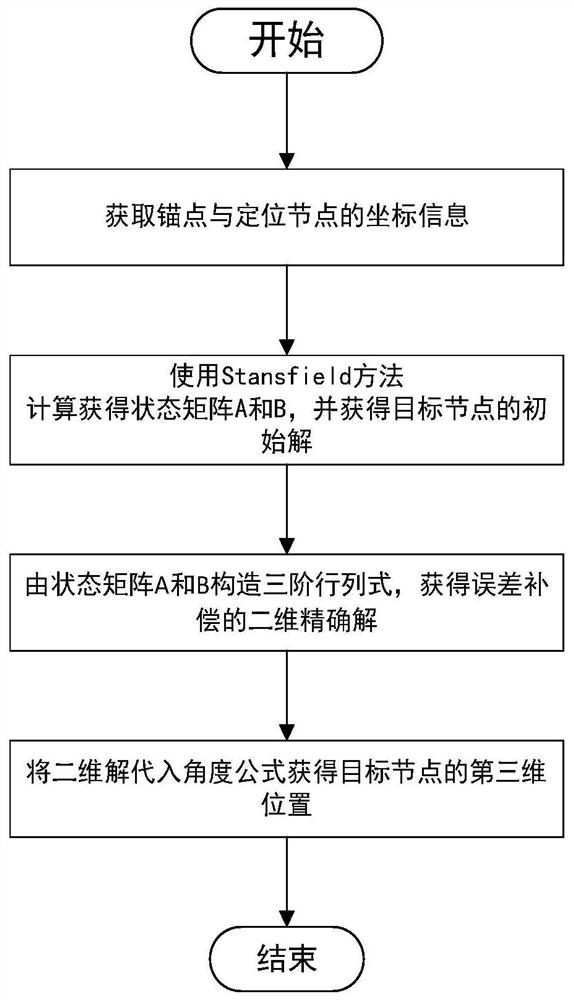
Method used
Image

Examples
Embodiment 1
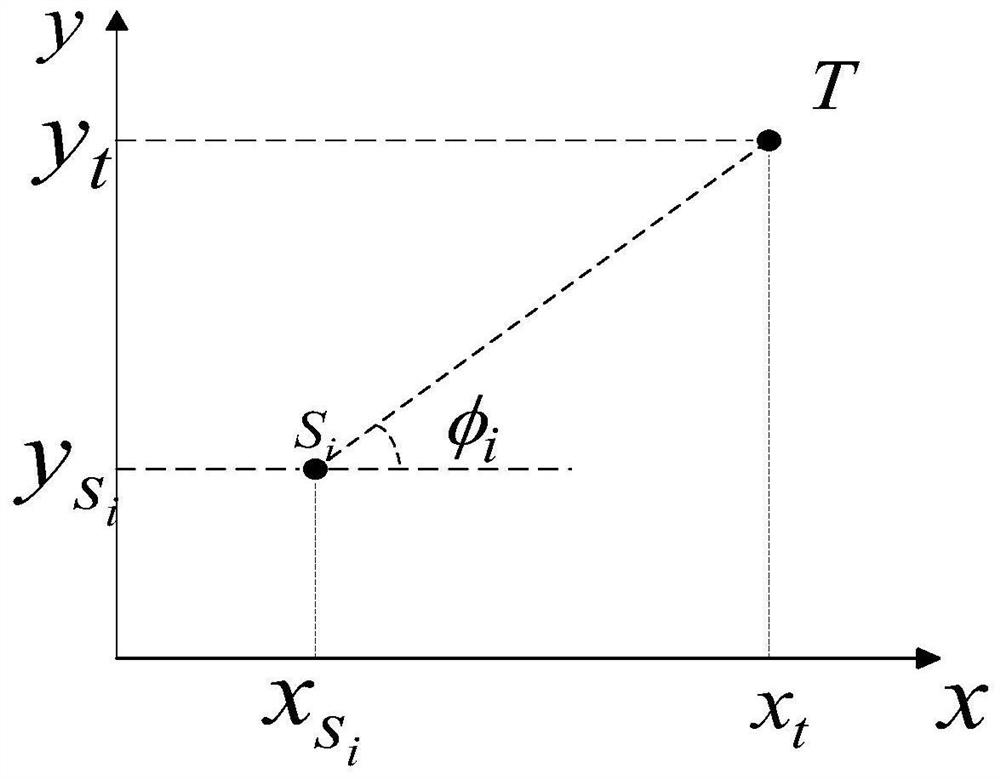
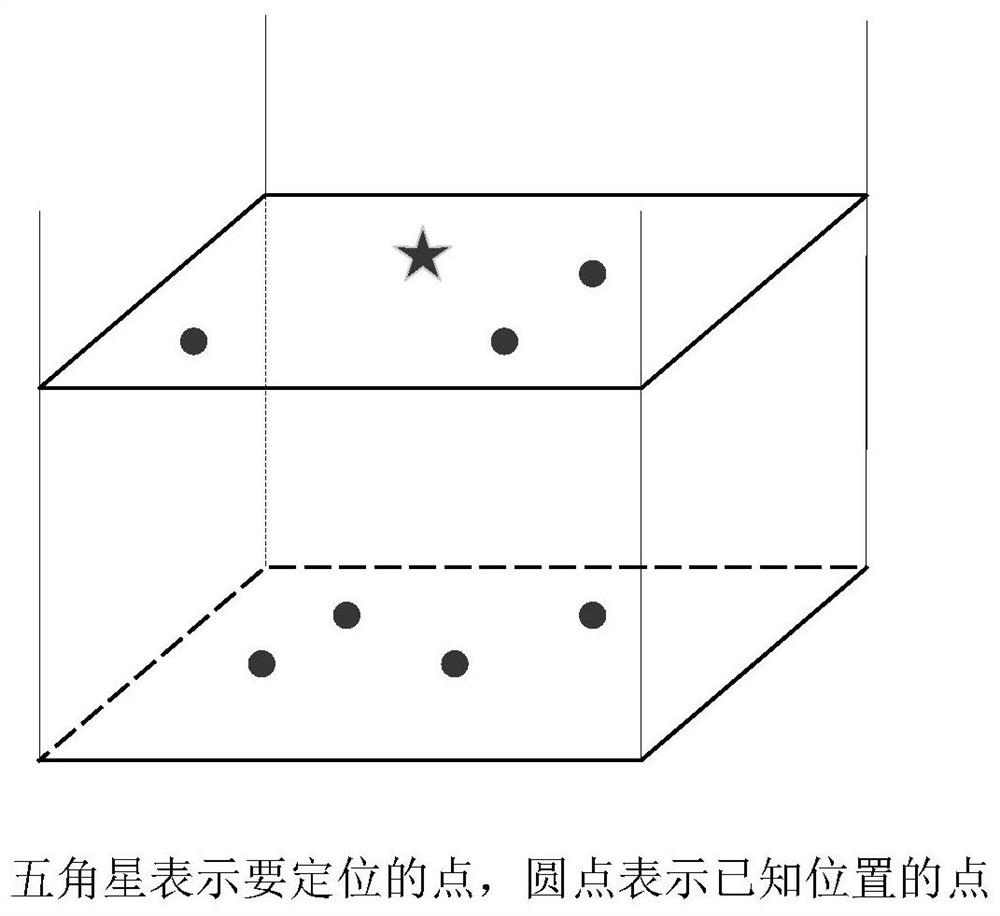
[0051] When locating the target node, in three-dimensional space, there is an unknown node t=(x t the y t z t )′, there are n anchor nodes The position is fixed and known. On the two-dimensional plane X-O-Y, there are n azimuths ψ i (i=1,...,n), which are the anchor nodes s i The measured value of the azimuth angle between the mapping point of the unknown node t on the X-O-Y plane (ie with T 0 =(x t the y t )′ included angle, T 0 =(x t the y t )′ is the mapping point of the unknown node t on X-O-Y), and the angle has an error term e i (i=1,...,n), namely:
[0052] ψ i = φ i +e i
[0053] Among them, φ i is the actual angle value, there is the following relationship:
[0054]
[0055] Among them, φ i ∈(-π,π).
[0056] At this point, two hypothetical a priori conditions are satisfied:
[0057] Condition 1: e i are Gaussian independent and identically distributed variables, their expectation is 0, and the variance is σ 2 , and with the true azimuth ...
Embodiment 2
[0119] The difference between this embodiment and Embodiment 1 is that the estimated value with error compensation will be obtained in step S3 in this embodiment As an exact solution, it is applied to the calculation of step S4.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More