Room layout estimation obtaining method and system based on key point heat map correction
An acquisition method and acquisition system technology, which are applied in the field of room layout estimation and acquisition based on key point heat map correction, can solve the problems of the final performance of the model, the number of incorrectly connected areas, etc., to reduce learning difficulty, reduce overlapping areas, Convergence reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
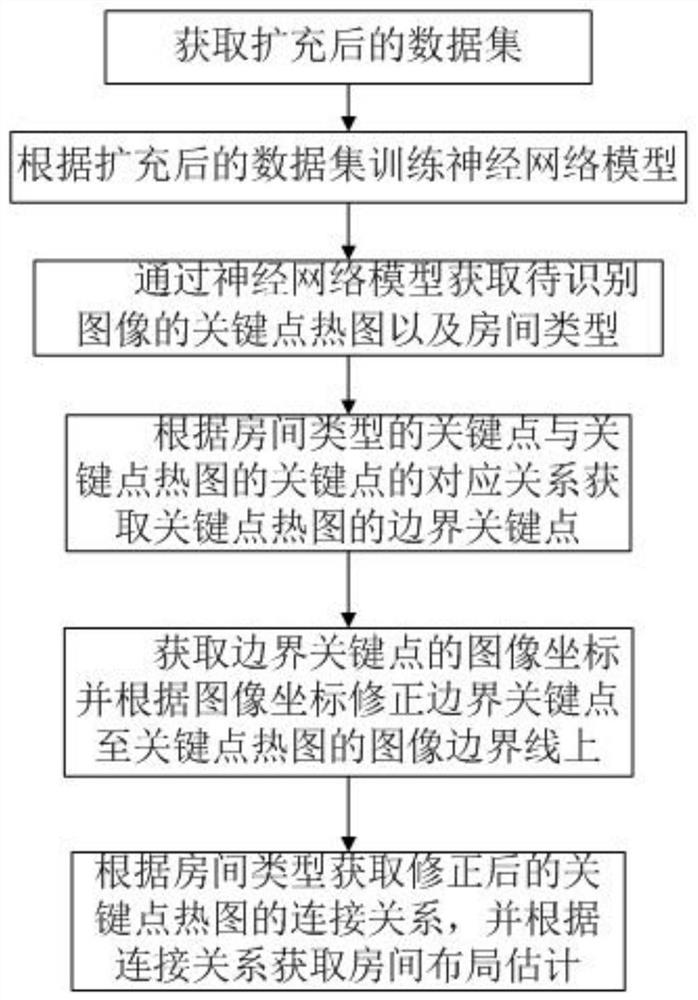
[0037] Based on the key point heat map obtained by the current neural network, we can understand that the key point of the boundary usually predicts the position of tens of pixels away from the boundary, resulting in an error when obtaining the connection relationship of the key point heat map according to the room type. The number of connected regions has a great impact on the final performance of the model. Secondly, the data set used when training the neural network is horizontally flipped when the data set is expanded. These operations can lead to The data is not accurate. In order to solve these problems, improve the accuracy of the model, such as figure 1 As shown, the present invention proposes a room layout estimation acquisition method based on key point heat map correction, which is specifically implemented through the following steps:
[0038] The training method of the neural network model specifically includes steps:
[0039] S01: Obtain a data set, the data set ...
Embodiment 2
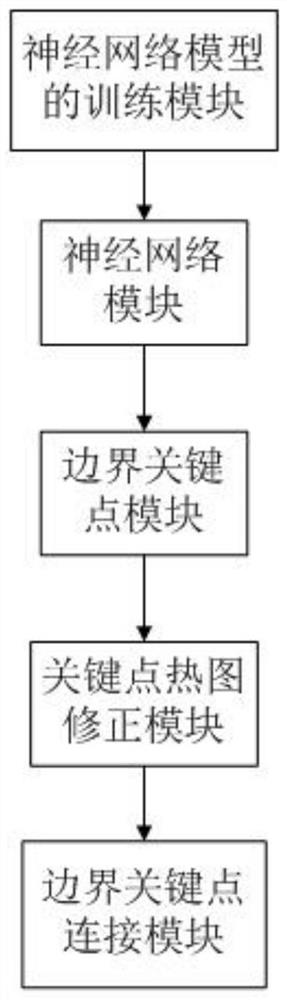
[0055] Such as figure 2As shown, the present invention proposes a room layout estimation acquisition system based on key point heat map correction, including:
[0056] The training module of the neural network model, including:
[0057] Obtaining a data set, the data set includes key point label maps of multiple types of preset room types, and obtaining an expanded data set by flipping the label maps and reordering the flipped label maps;
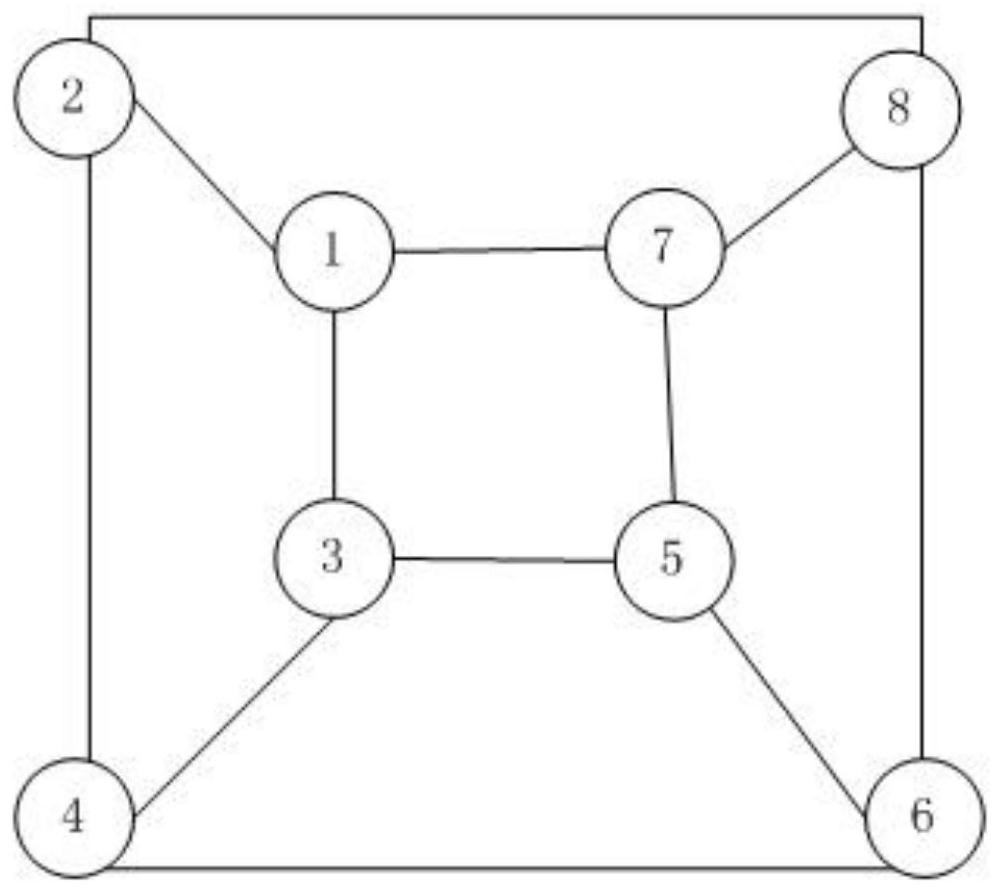
[0058] The reordering method is as follows: taking the labeling order of the labeling diagram before flipping as the sorting standard, so that the labeling sequence after flipping is consistent with the sequence of the labeling diagram before flipping.
[0059] It should be noted that, first of all, after reordering the key points of the flipped picture, each point is distributed in a relatively fixed area in the picture. This operation reduces the learning difficulty of the neural network, enables the network to converge faster and To a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com