

Metamorphic wheel foot type quadruped robot
A quadruped robot and wheel foot technology, applied in the field of robotics, can solve the problems affecting the stability of the overall structure, the outriggers cannot be used for walking, and increase the manufacturing cost, so as to improve the stability of the fuselage, good terrain adaptability, and use convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to facilitate those skilled in the art to understand the technical solution of the present invention, the technical solution of the present invention will be further described in conjunction with the accompanying drawings.
[0036] The terms "first" and "second" are used for descriptive purposes only, and cannot be understood as indicating or implying relative importance or implicitly specifying the quantity of indicated technical features. Thus, a feature defined as "first" and "second" may explicitly or implicitly include one or more of these features. In the description of the present application, "plurality" means two or more, unless otherwise specifically defined.
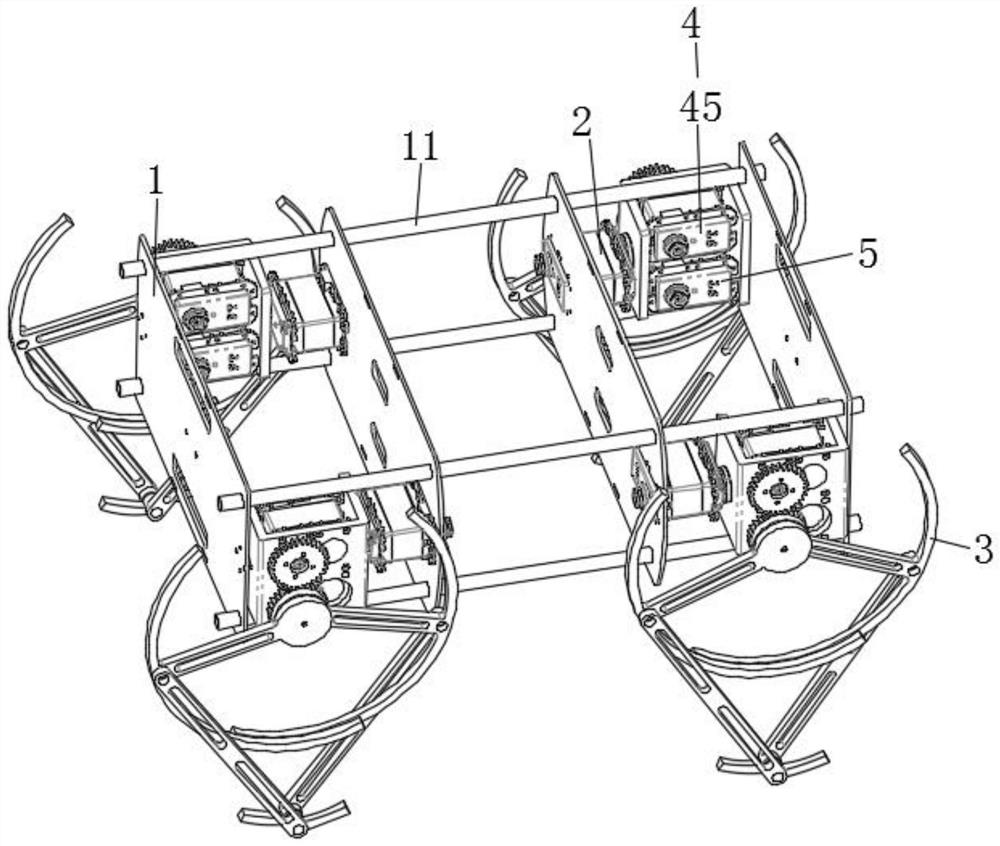
[0037] refer to figure 1 , this embodiment discloses a quadruped robot with variable cell wheels, which includes a plurality of vertical plates 1 arranged side by side along the length direction of the quadruped robot with variable cells wheel, a first motor 2, and four sets of caster wheel co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More