

Vehicle control method and device, electronic equipment and medium
A vehicle control and vehicle technology, applied in the field of computer and automatic driving, can solve the problems of vehicle obstacles, uncertain safety, unreasonable methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
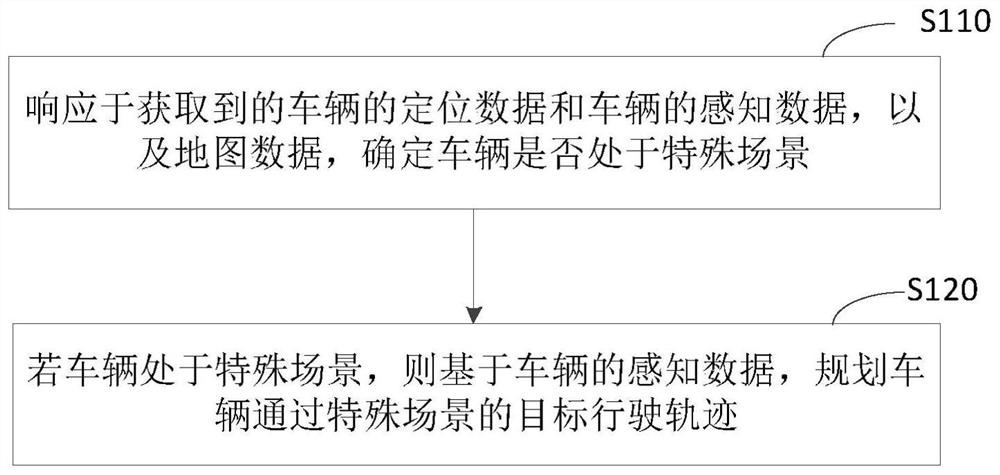
[0045] figure 1 It is a flow chart of a vehicle control method provided according to the first embodiment of the present application. This embodiment is applicable to how to ensure the safe driving of vehicles on special roads, where the vehicles can be ordinary vehicles driving on roads, or It could be an autonomous vehicle. The method can be executed by a vehicle control device, which can be implemented in the form of software and / or hardware, and can be integrated into the autonomous vehicle, and further can be integrated into the decision planning module of the autonomous vehicle. Such as figure 1 As shown, the vehicle control method provided in this embodiment may include:
[0046] S110, in response to the acquired vehicle positioning data, vehicle perception data, and map data, determine whether the vehicle is in a special scene.
[0047] Optionally, a positioning system, a perception device, and a high-precision map module can be integrated in the vehicle. Among the...
no. 2 example
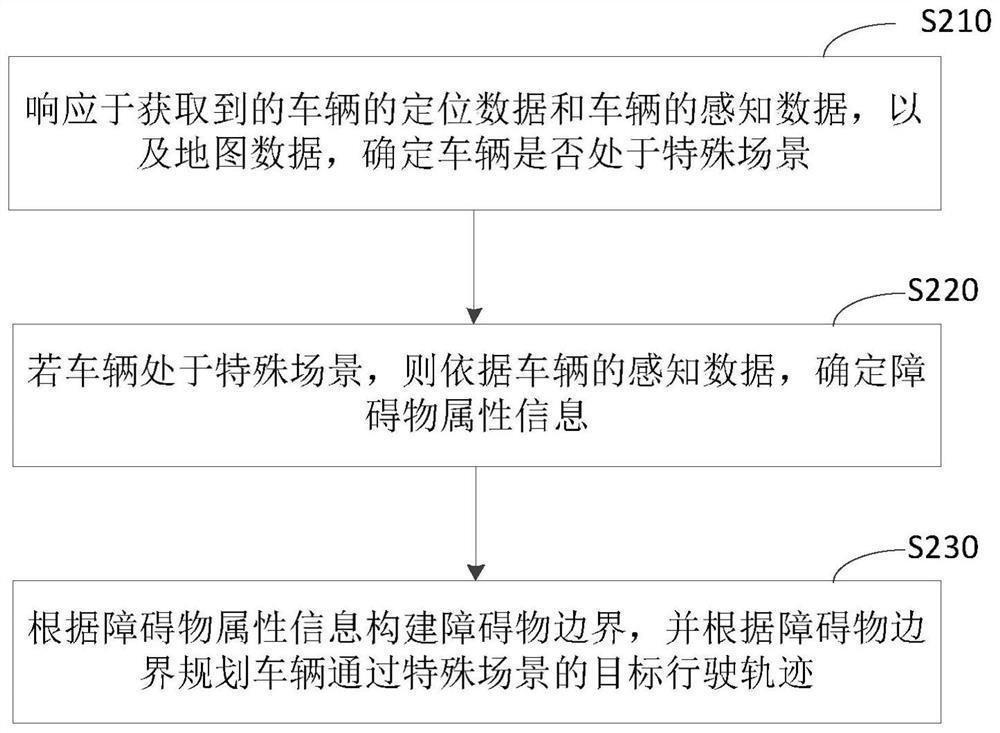
[0066] Figure 2A It is a flow chart of a vehicle control method provided according to the second embodiment of the present application. On the basis of the above embodiments, this embodiment provides a method for planning the target driving trajectory of the vehicle through a special scene based on the perception data of the vehicle. scheme. Such as Figure 2A As shown, the vehicle control method provided in this embodiment may include:
[0067] S210, in response to the acquired vehicle positioning data, vehicle perception data, and map data, determine whether the vehicle is in a special scene.
[0068] S220. If the vehicle is in a special scene, determine obstacle attribute information according to the perception data of the vehicle.
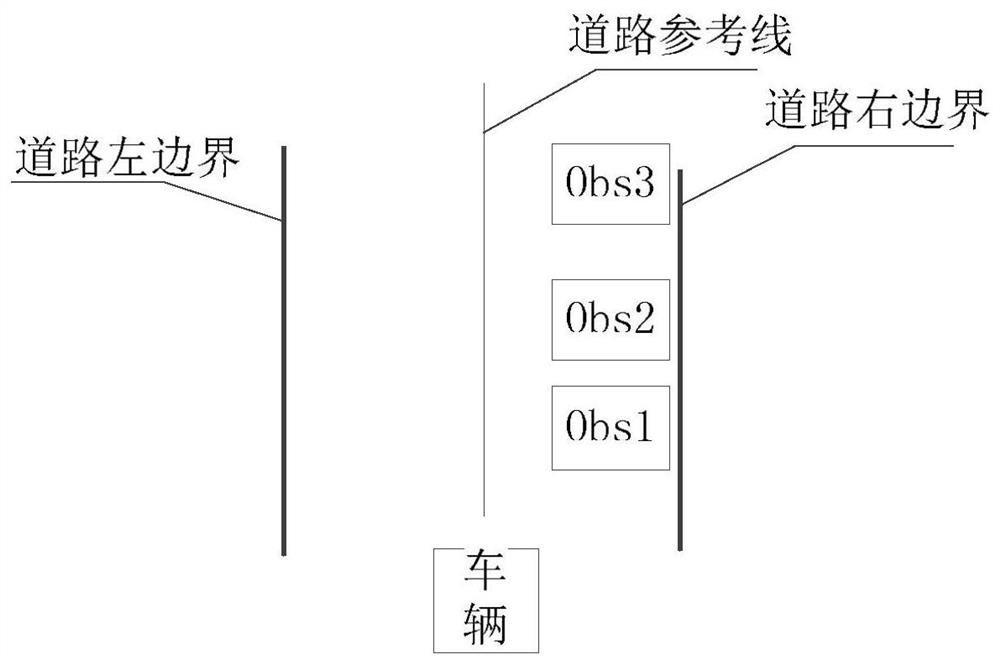
[0069] S230. Construct an obstacle boundary according to the obstacle attribute information, and plan a target driving trajectory of the vehicle through the special scene according to the obstacle boundary.
[0070] Optionally, for the sec...
no. 3 example
[0084] Figure 3A It is a flow chart of a vehicle control method provided according to the third embodiment of the present application. On the basis of the above embodiments, this embodiment also provides a method for planning the target driving of the vehicle through a special scene based on the perception data of the vehicle. trajectory scheme. Such as Figure 3A As shown, the vehicle control method provided in this embodiment may include:
[0085] S310, in response to the acquired vehicle positioning data, vehicle perception data, and map data, determine whether the vehicle is in a special scene.
[0086] S320. If the vehicle is in a special scene, determine obstacle attribute information according to the perception data of the vehicle.
[0087] S330. Planning candidate driving trajectories for the vehicle passing through the special scene.
[0088] In this embodiment, a conventional trajectory planning method such as a dynamic trajectory planning method or a secondary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More