Athletic device and method
A competition and component technology, applied in the field of competition and competition, can solve the problems of difficult high-level competition, low speed measurement accuracy, etc., to achieve the effect of improving the fun
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
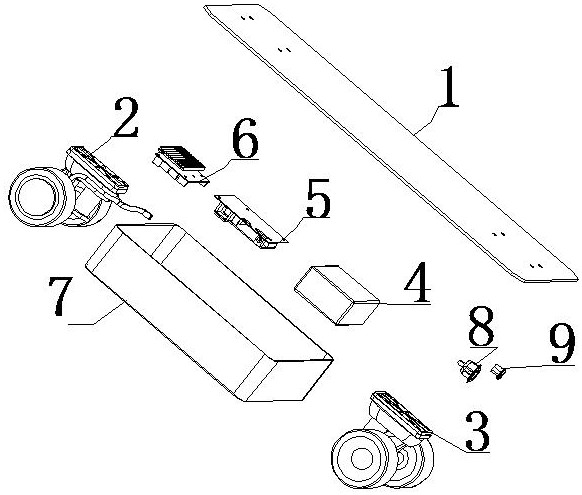
[0046] figure 1 The competitive device of the embodiment includes a pedal 1, a motor and a bridge assembly 2, a driven wheel and a bridge assembly 3, a power supply assembly 4, a main control board assembly 5, a motor drive module 6, a protective cover 7, a power switch 8, a battery charging port 9, etc. . With reference to the existing electric scooter, general-purpose pedals, motors and bridge components, driven wheels and bridge components, power components, power switches, battery charging ports can be selected and connected to each other.
[0047] In this embodiment, two in-wheel motors with a working voltage of 24V, a power of 120W, and a diameter of 72mm are preferred, and standard bridges and spare parts matched with the in-wheel motors form the motor and bridge components. Two PU wheels with a diameter of 72mm are matched with the motor and bridge components. The standard bridge and spare parts form the driven wheel and bridge components, and the power type lithium b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



