Cooperative rendezvous and docking control method of unmanned ship and unmanned underwater vehicle combined system
An unmanned submersible, rendezvous and docking technology, applied in non-electric variable control, height or depth control, control/regulation systems, etc. The effect of docking accuracy, improving disturbance immunity, improving efficiency and applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
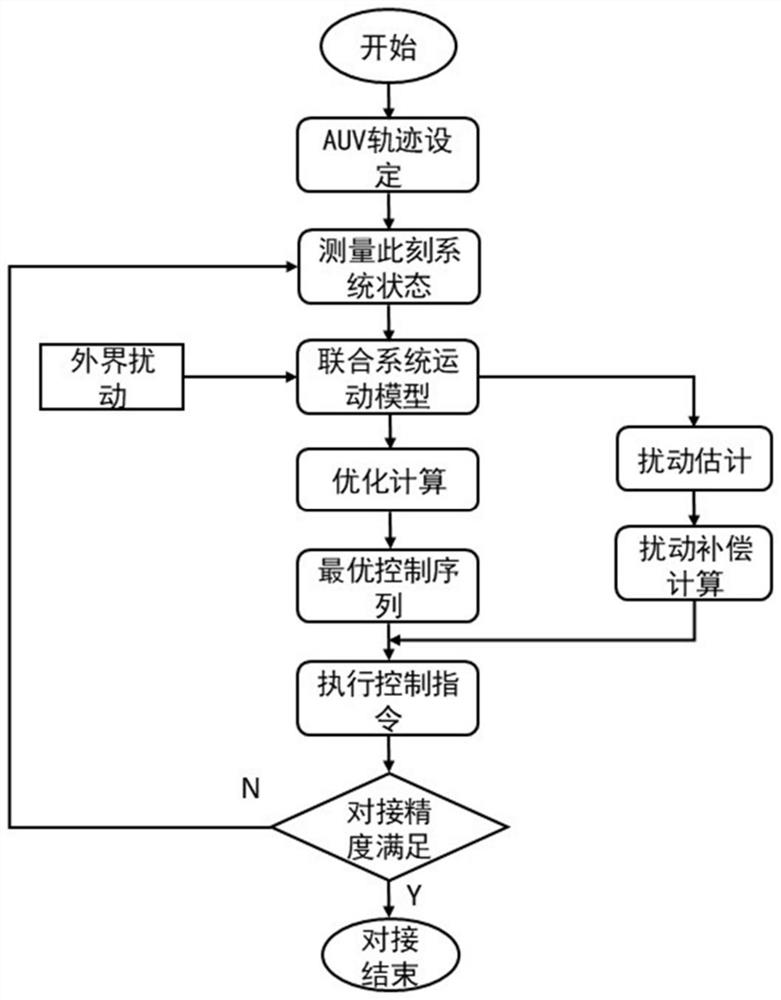
[0088] The invention provides a cooperative rendezvous and docking control method for the joint system of unmanned boats and underwater unmanned submersibles, solves the problem of rendezvous and docking between unmanned boats and underwater unmanned submersibles in complex ocean environments, and proposes a feasible solution Solution and improve the anti-disturbance ability of the system, the method specifically includes the following steps:
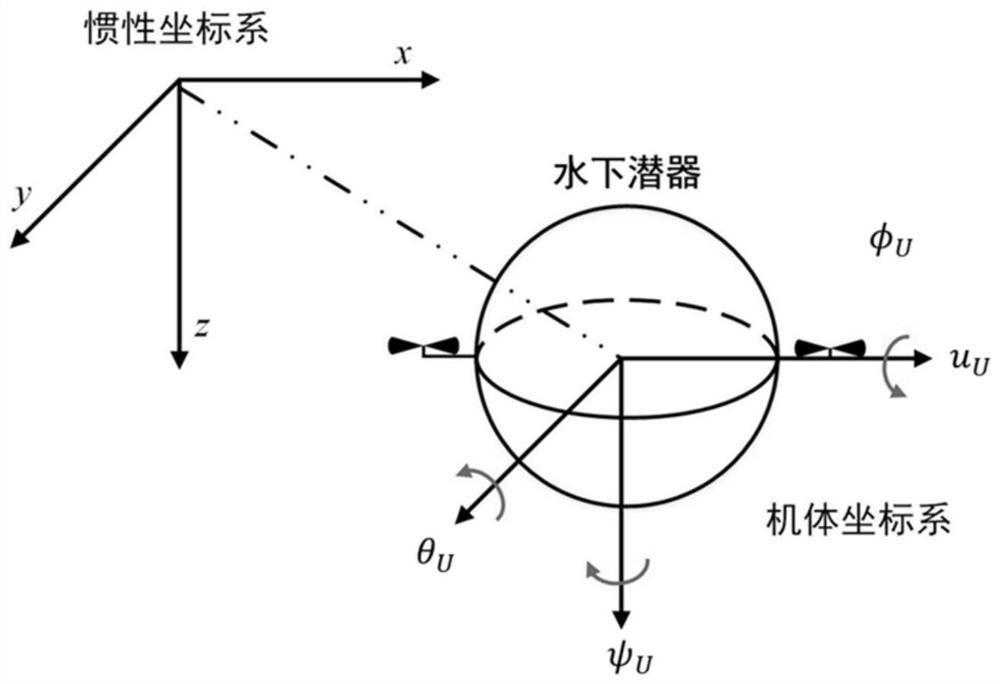
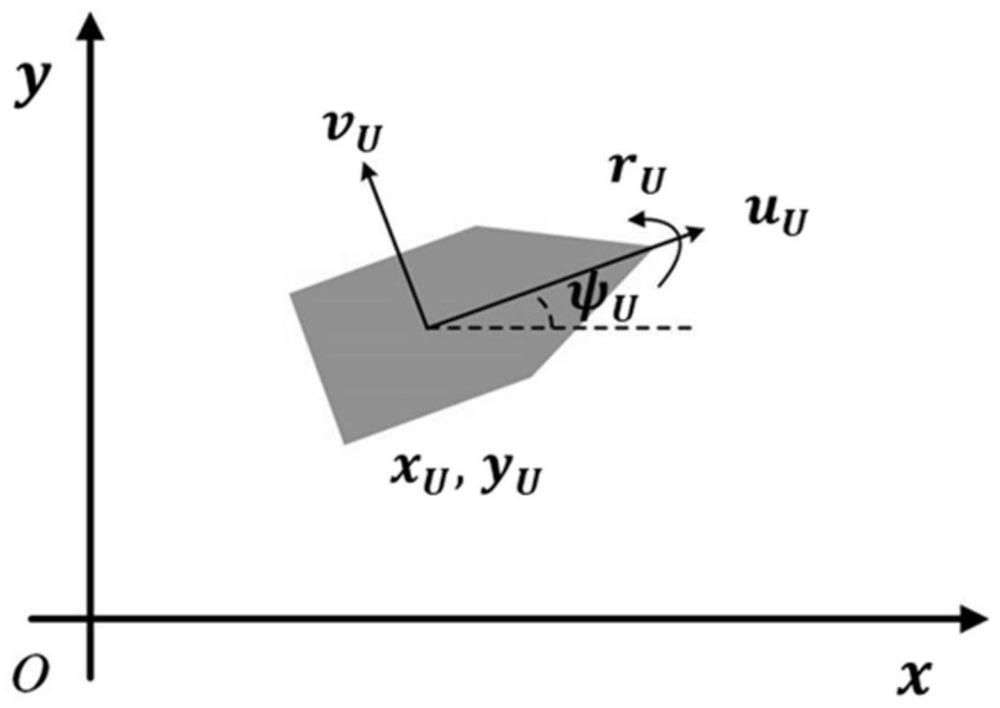
[0089] 1) Establish and discretize the dynamic model of the unmanned ship and the underwater unmanned submersible under external low-frequency disturbances;
[0090] 2) Collect the state information of the unmanned boat and the underwater unmanned submersible at the current t=k moment;
[0091] 3) Process the collected state information at time k and information at time k-1, and estimate the external disturbance to obtain an estimated value
[0092] 4) According to the state information of the unmanned boat and underwater unmanned su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More