

A graded automatic collision warning method based on forward-looking obstacle detection sonar
A collision alarm and forward-looking technology, applied in the direction of sound wave re-radiation, instruments, measuring devices, etc., can solve the problems of high false alarm rate of collision alarm, adverse effects on normal navigation of underwater vehicles, and failure to objectively reflect the degree of criticality, etc. To achieve the effect of reducing the false alarm rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0068] In this embodiment, the specific alarm method is shown in the aforementioned S1 to S3, which will not be repeated.
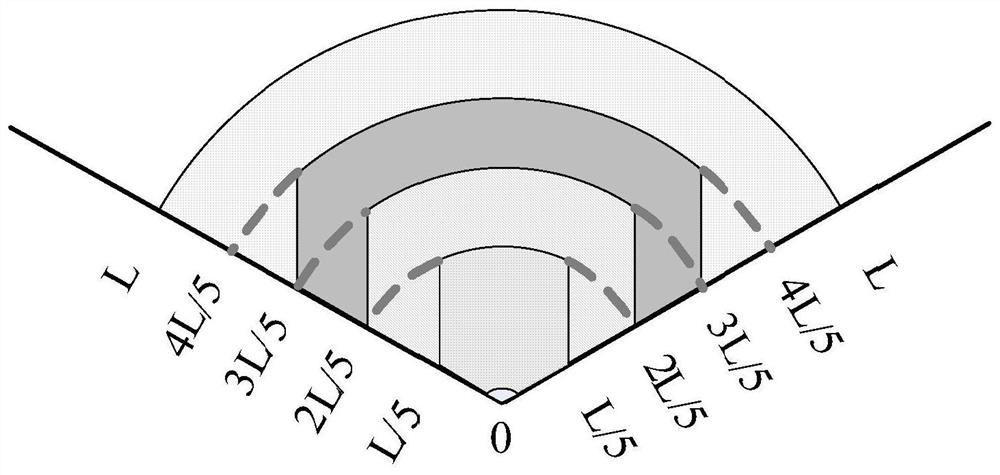
[0069] Among them, in S1, according to the aforementioned collision risk function, the interval of the collision risk value of the underwater submersible is divided into 4 continuous value intervals, so the sonar field of view with the maximum detection distance of L is also divided into 4 levels correspondingly area. like figure 1 As shown in the figure, the collision risk classification alarm area map divided by this embodiment includes four grade areas, which can be represented by red, orange, yellow and blue respectively in actual use, respectively representing the underwater vehicle and the area in the area. The collision hazard classes for obstacle targets are Class I (high risk), Class II (medium-high risk), Class III (medium risk), and Class IV (low risk).
[0070] In this embodiment, an alarm speaker and a flashing light are built in the UI int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More