

A Compensation Method for Inertial Force of Robot
A compensation method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large calculation errors and large inertial force errors, and achieve the effect of eliminating influence, concise form and smooth motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
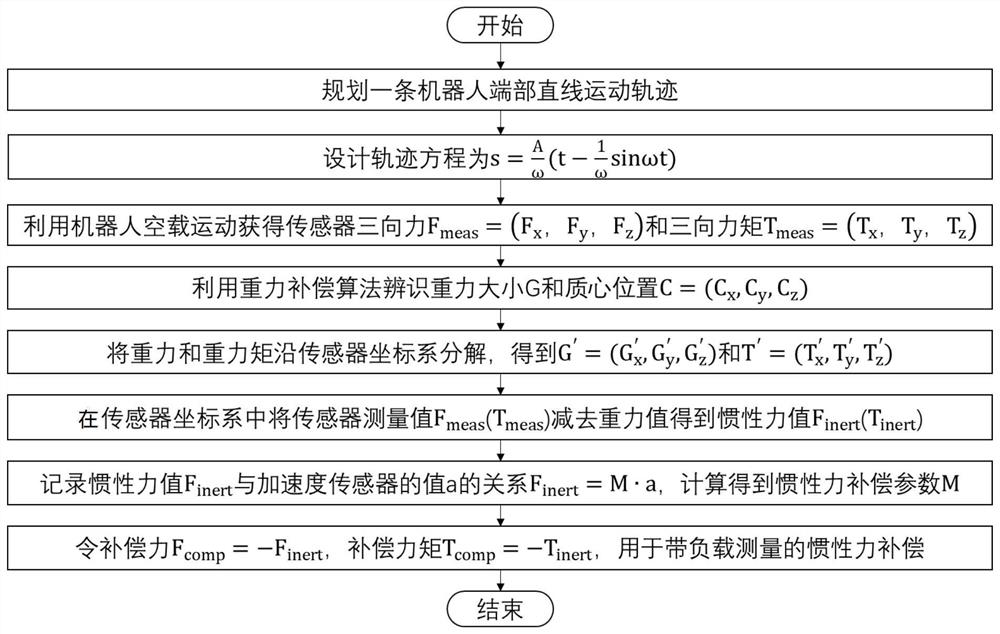
[0045] Example: such as figure 1 As shown, a robot inertial force compensation method, by measuring the inertial force and using the measured acceleration, establishes the mapping relationship between the inertial force and the acceleration, so as to accurately compensate the inertial force, including:
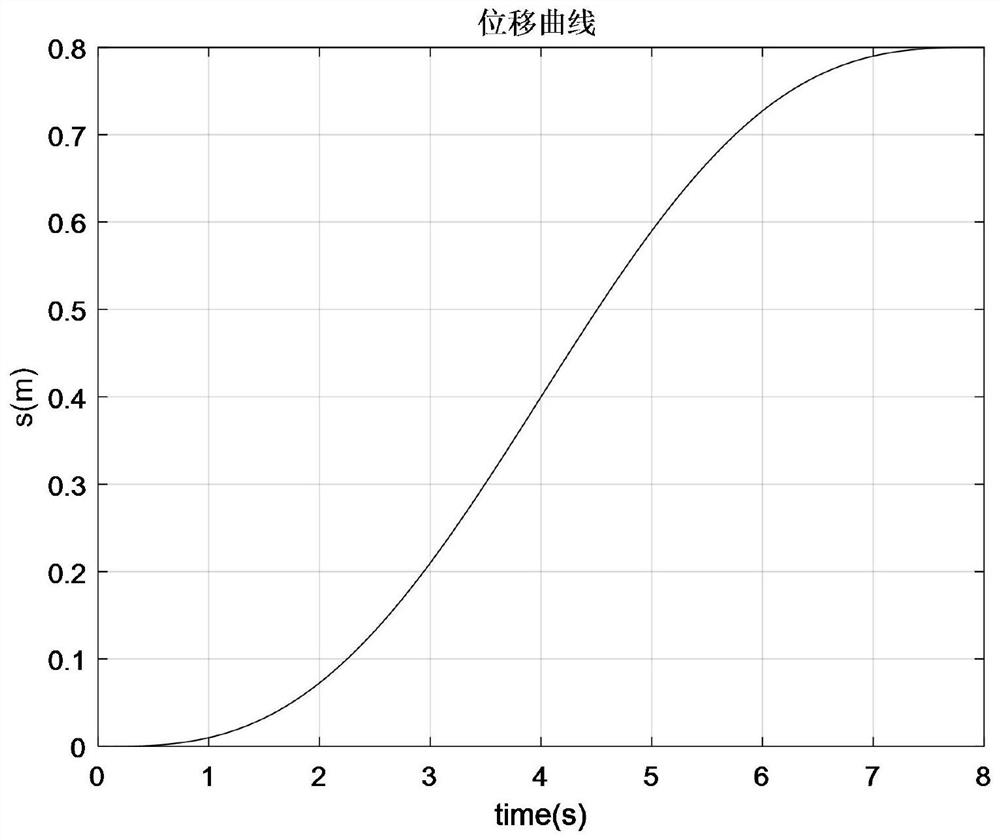
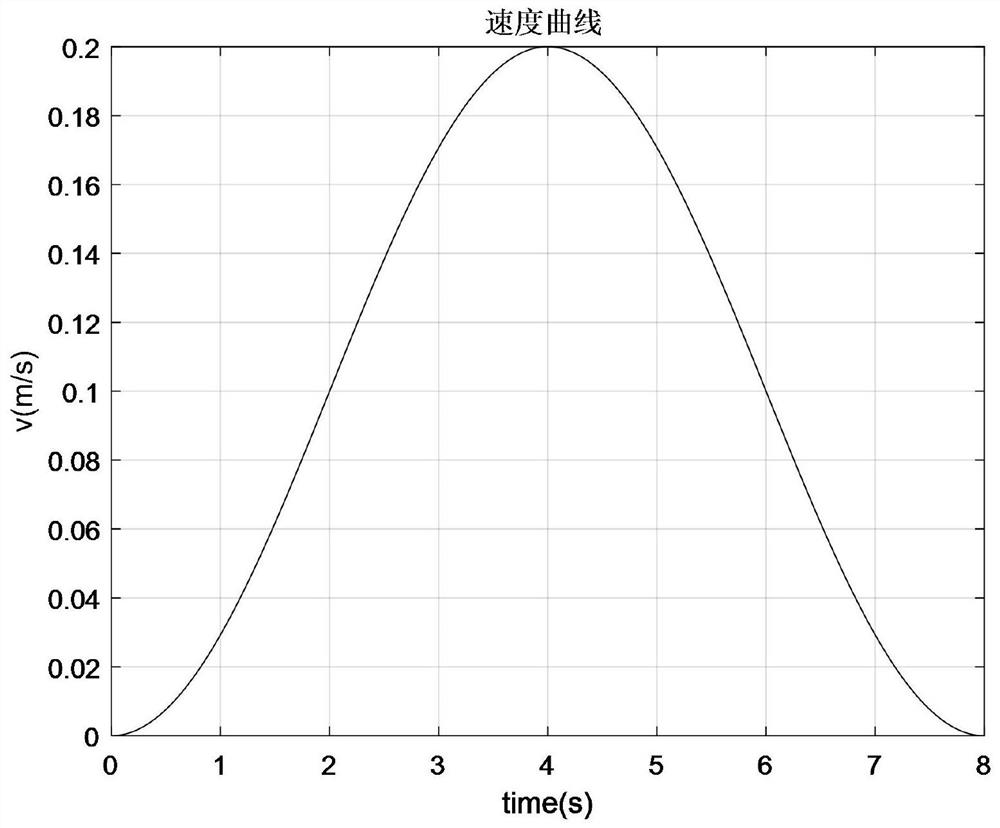
[0046] S1. Obtain the acceleration, including planning the end of the robot to move in a straight line, and determine its starting point and end point, and establish the parameter equation of the motion trajectory as Sampling all time step points in the linear motion, and calculating the acceleration a(t) of all time step points;
[0047] First, determine the starting point of the linear motion of the end of the robot Ps=(x s ,y s ,z s ) and end point Pe=(x e ,y e ,z e ), calculate the straight-line distance between them as Determine the total time of the linear motion of the end of the robot as T, wherein the distance between the two points is located in the working s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More