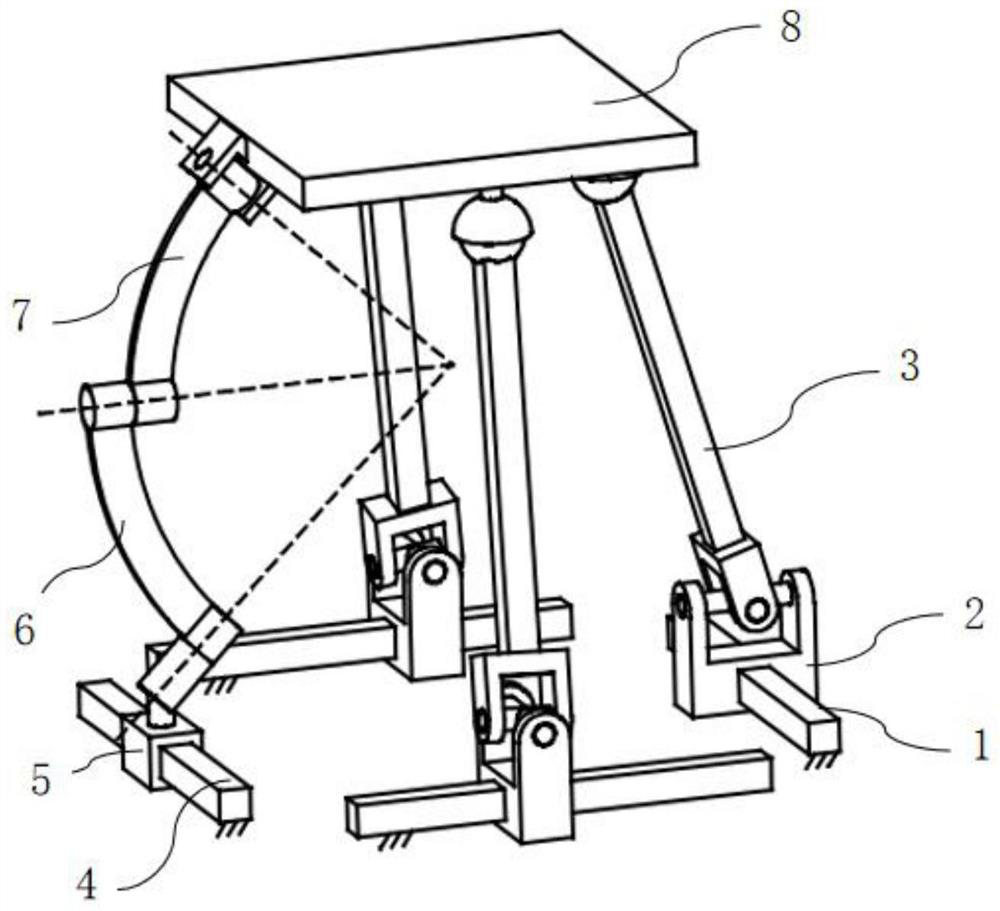
Four-dimensional parallel mechanism
A parallel, four-dimensional technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low stiffness and weak bearing capacity, and achieve the effect of high stiffness and strong bearing capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The following description provides many different embodiments, or examples, for implementing various features of the invention. The elements and arrangements described in the following specific examples are only used to express the present invention in a concise manner, and are only used as examples rather than limiting the present invention. For example, a description of a first feature on or over a second feature includes direct contact between the first and second features, or another feature disposed between the first and second features such that the second feature The first and second features are not in direct contact.
[0013] Spatially relative terms, such as above or below, are used herein to simply describe the relationship of one element or one feature with respect to another element or feature on the drawings. This includes the device being used or operated in different orientations than those depicted in the figures.
[0014] The shapes, dimensions, thic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More