

Control method and system of unmanned ship
A technology of control method and control system, which is applied in the field of control method and system of unmanned ships, can solve the problems of inconvenient automatic charging and regular maintenance of unmanned aerial vehicles, inconvenient speed and course adjustment of unmanned aerial vehicles, etc., so as to facilitate automatic charging and regular maintenance. The effect of maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
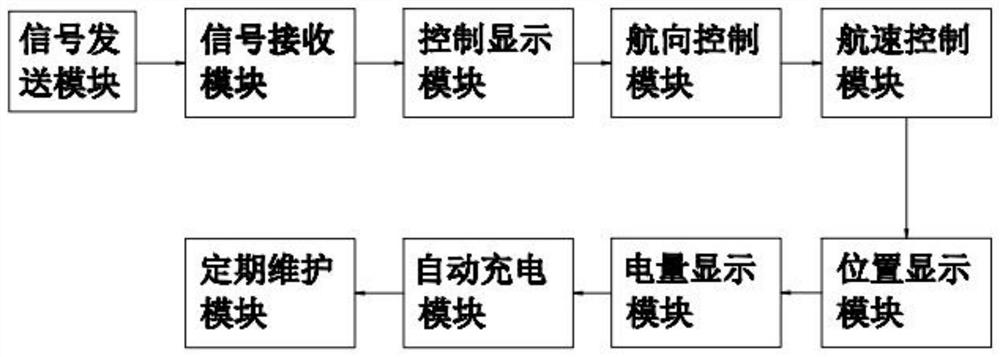
[0029] refer to Figure 1-5 , a control method for an unmanned ship, comprising the following steps:
[0030] S1: Signal sending and receiving display: the unmanned ship sends the signal information, and the background receives and displays the sent signal information;
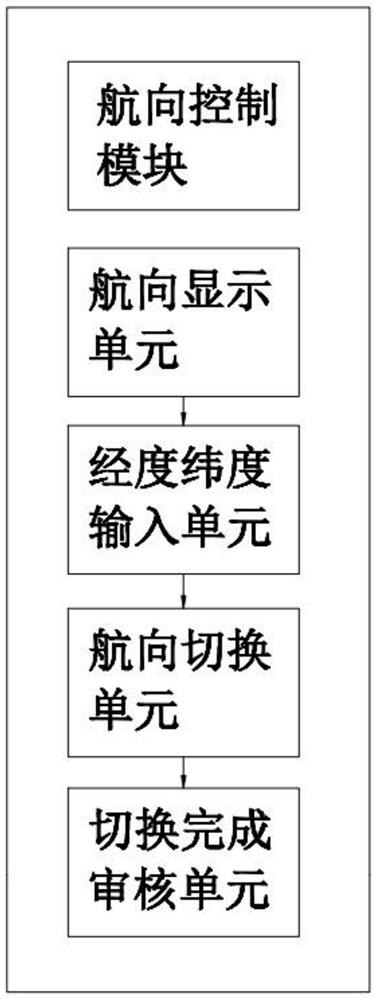
[0031] S2: Course control: The course of the unmanned ship is displayed in the background, and the longitude and latitude are input in the background to realize the control of the course of the unmanned ship;
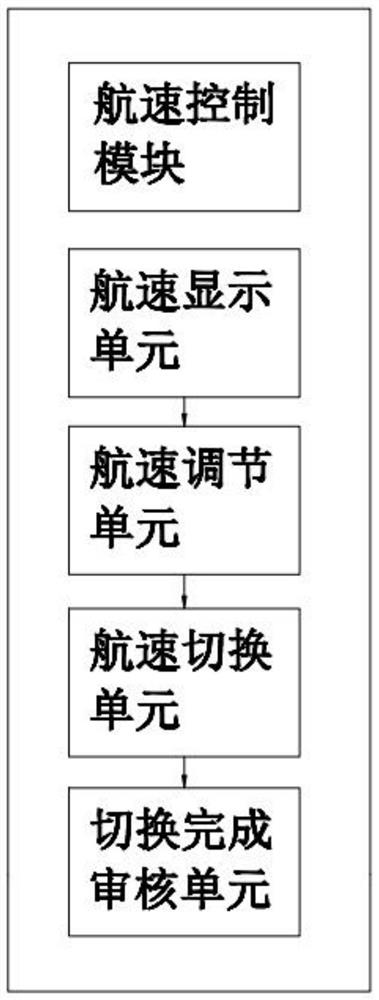
[0032] S3: Speed control: the background displays the speed of the unmanned ship, and adjusts the speed in the background to realize the control of the speed of the unmanned ship;
[0033]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More