

Target detection method based on CARLA simulator
A target detection algorithm and target detection technology, applied in the field of automatic driving simulation platform design, can solve the problems of large manpower, material resources and time, simulation difficulty, high difficulty, etc., achieve fast speed, reduce overfitting effect, and high precision Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below with reference to the accompanying drawings.
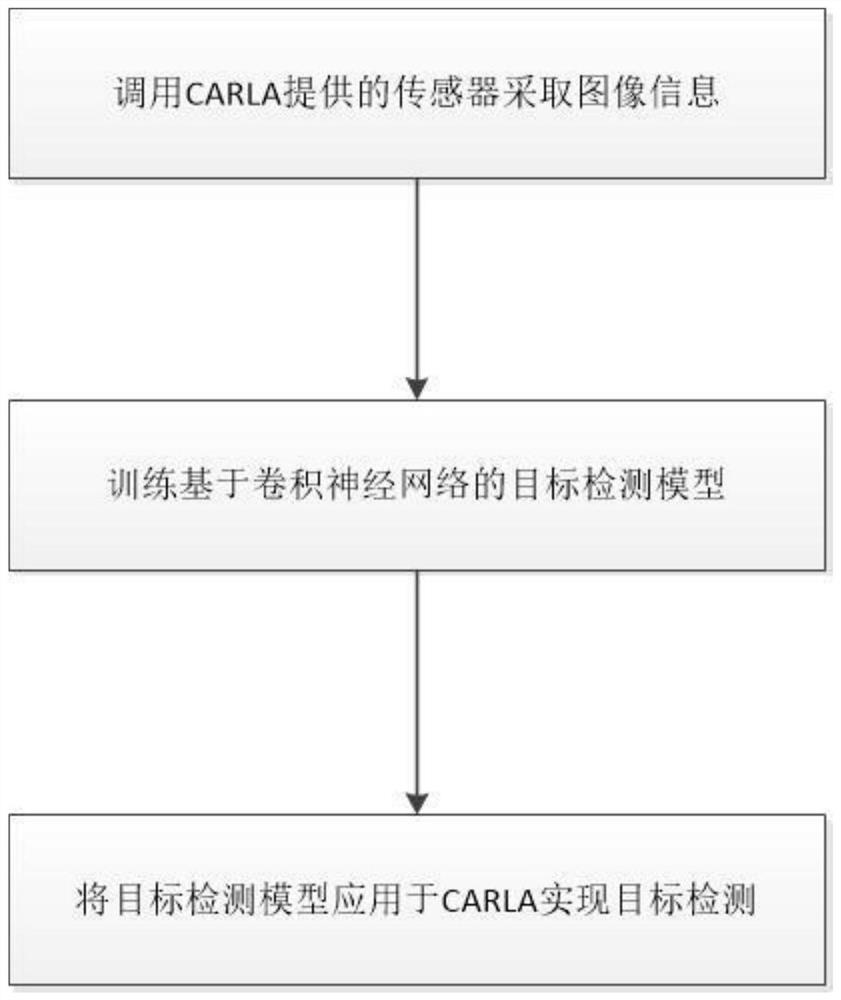
[0034] Refer figure 1 A Target Detection Method Based on a Carla Simulator, including the target detection model of virtual sample data training through the Carla Simulator, and its training methods are:
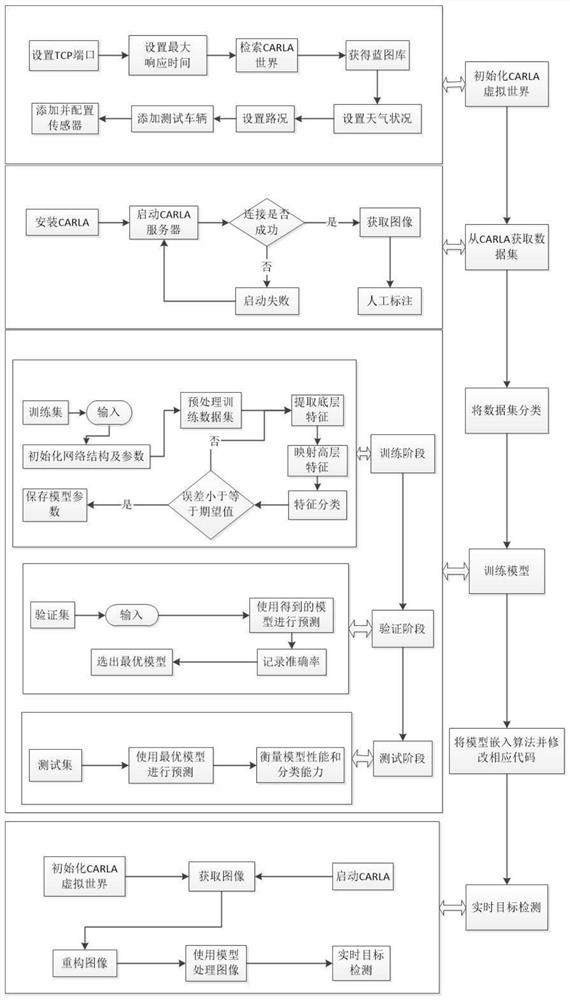
[0035] Step S10, start the Carla simulator, generate virtual sample data through the Carla Simulator; the virtual sample data includes an image obtained in a Carla simulator; calling the CARLA simulator to take a different road condition, different weather conditions Rich differential image information;
[0036] Step S20, by the target detection algorithm based on the convolutional neural network, the image information acquired from the Carla virtual environment is constructed to have a data set of training sets, verification sets, and test sets, and training the target detection model based on convolutional neural network. By iterative training by the target det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More