

Method and system for determining steering angle of vehicle steering wheel
A technology for determining the steering angle, which is applied to vehicle components, steering mechanisms, transportation and packaging, etc., can solve problems such as insufficient steering wheel rotation angle and steering wheel shaking back and forth, and achieve the effects of avoiding non-convergence of control signals, small jitter, and improved performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0065] to combine figure 2 and image 3 As shown, Embodiment 1 of the present invention provides a method for determining a steering wheel steering angle of a vehicle, including:
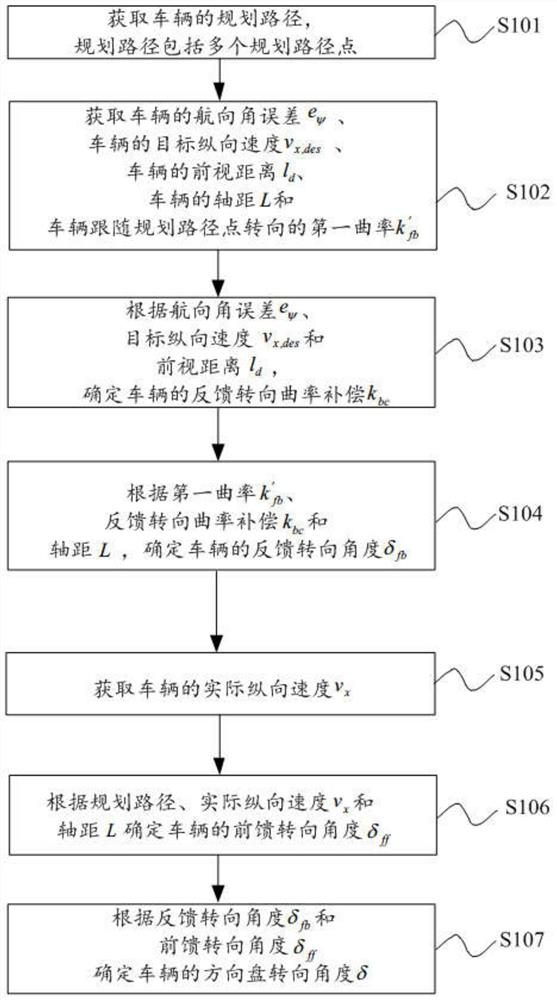
[0066] Step S101: Obtain the planned route of the vehicle, the planned route includes a plurality of planned route points;
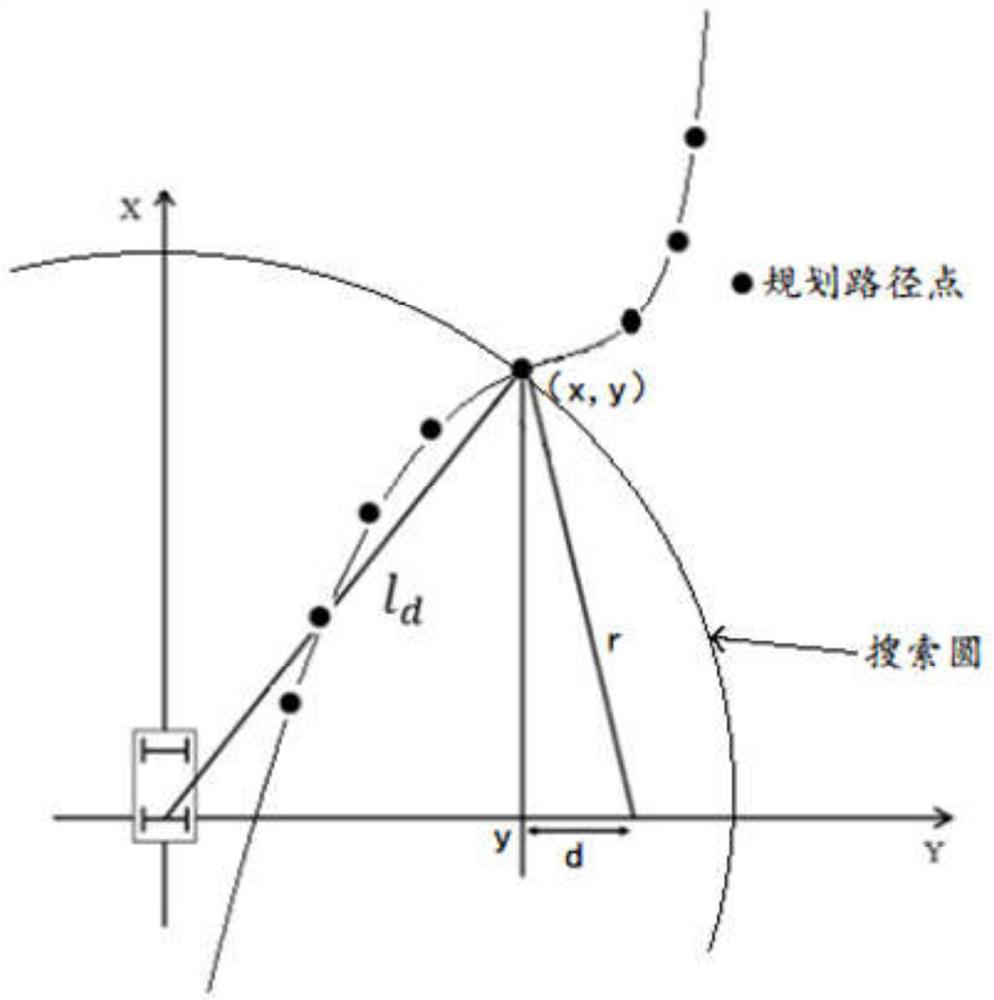
[0067] Step S102: Obtain the heading angle error e of the vehicle ψ , the vehicle's target longitudinal velocity v x,des , the vehicle's front-sight distance l d , the wheelbase L of the vehicle and the first curvature k′ of the vehicle following the planned route point fb ;
[0068] Step S103: According to the heading angle error e ψ , the target longitudinal velocity v x,des and look-ahead distance l d , to determine the feedback steering curvature compensation k of the vehicle bc ;
[0069] Step S104: According to the first curvature k' fb , feedback steering curvature compensation k bc and wheelbase L, determine the feedback steering angle δ of the vehicle fb ...
Embodiment 2
[0120] In Embodiment 2, step S101, step S102 and step S105 can be completed in the same step. The feedforward ratio a and the feedback ratio b can be adjusted according to the vehicle's own requirements and actual conditions.
Embodiment 3
[0122] to combine Figure 4 As shown, Embodiment 3 of the present invention provides a vehicle steering wheel steering angle determination system, including:
[0123] An information acquisition unit 30, configured to acquire the heading angle error e of the vehicle ψ , the vehicle's target longitudinal velocity v x,des , the vehicle's front-sight distance l d , the wheelbase L of the vehicle, the actual longitudinal velocity v of the vehicle x , the planned path of the vehicle with multiple planned waypoints and the first curvature k′ of the vehicle following the planned waypoints fb ;
[0124] The first determination unit 31 is used to determine according to the heading angle error e ψ , the target longitudinal velocity v x,des and look-ahead distance l d , to determine the feedback steering curvature compensation k of the vehicle bc ;
[0125] The second determining unit 32 is used for according to the first curvature k' fb , feedback steering curvature compensatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More