Cascade control method for finite time path tracking of autonomous underwater vehicle
An underwater vehicle, limited time technology, applied in the direction of vehicle position/route/altitude control, non-electric variable control, altitude or depth control, etc., can solve the limited time cascade control that does not involve underwater vehicle path tracking and other problems, to achieve the effect of global finite time stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the technical solutions and advantages of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
[0051]A cascade control method for finite-time path tracking of an autonomous underwater vehicle, comprising the following steps:
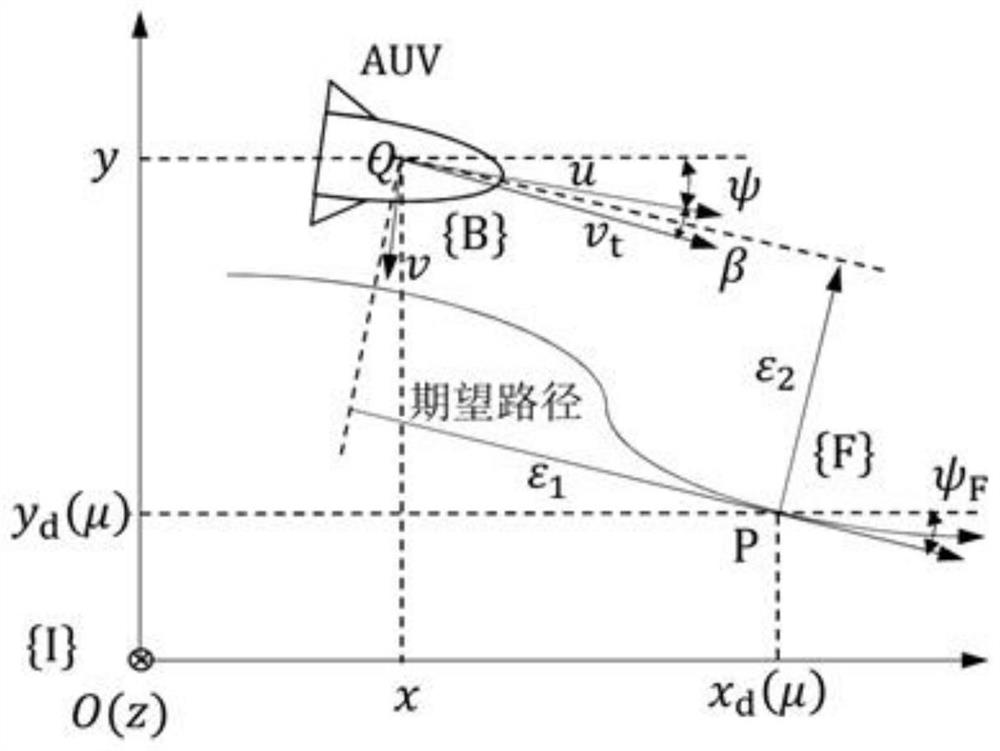
[0052] S1: According to the kinematic equation of autonomous underwater vehicle, establish path tracking error dynamic equation;
[0053] S2: Design a kinematic equivalent controller to transform the path tracking error dynamic equation into a new cascaded system;
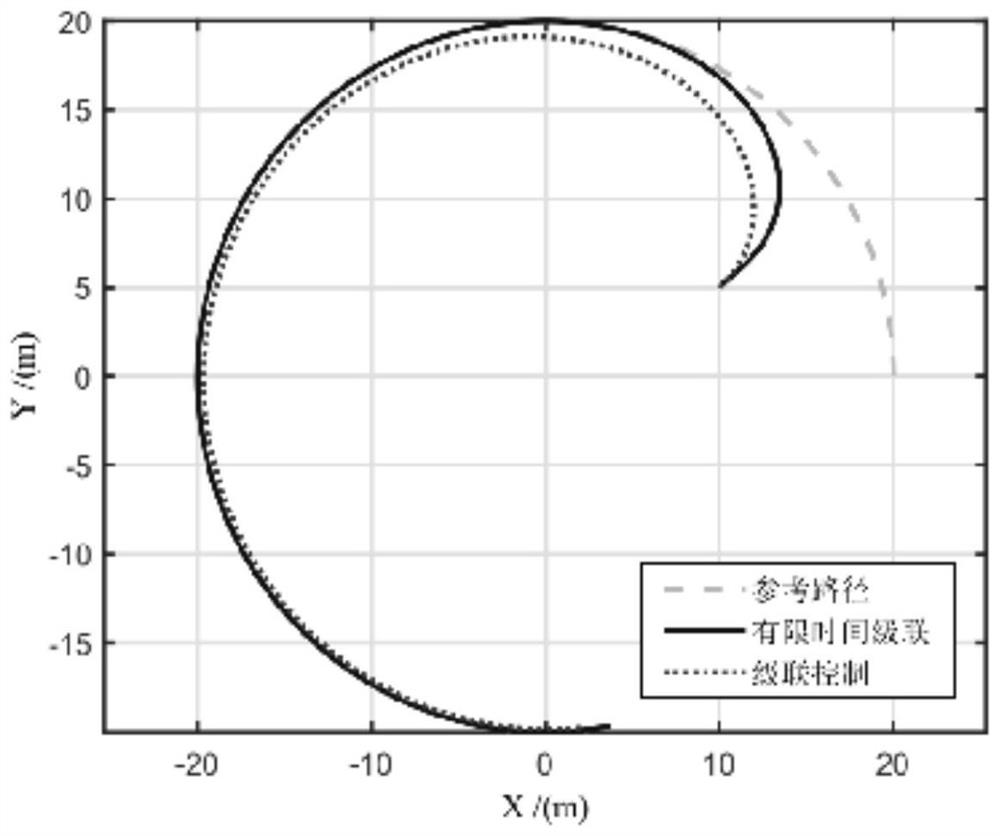
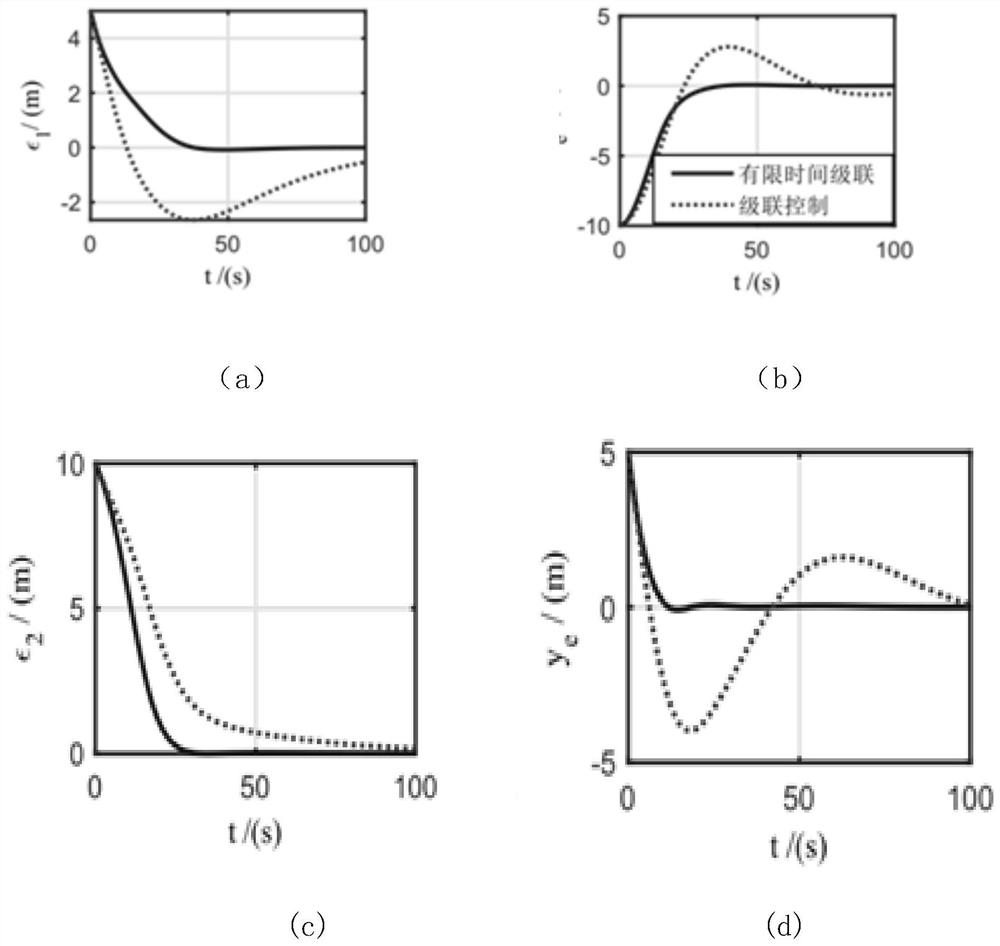
[0054] S3: Carry out the limited control of the speed and heading of the autonomous underwater vehicle through the speed error subsystem and the heading error subsystem respectively, and use the obstacle Lyapunov function and the finite time control method to stabilize the cascade disturbance subsyst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More