Anti-interference adaptive fuzzy sliding mode cooperative control method based on multi-agent
An adaptive fuzzy, multi-agent technology, applied in the direction of motor speed or torque control, control system, control generator, etc., can solve the problems of control accuracy error of multiple agents, mutual interference of agents, etc., to achieve The effect of solving the problem of parameter uncertainty, simplifying the structure, and improving the accuracy of speed synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below with reference to the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the embodiments are not intended to limit the present invention.
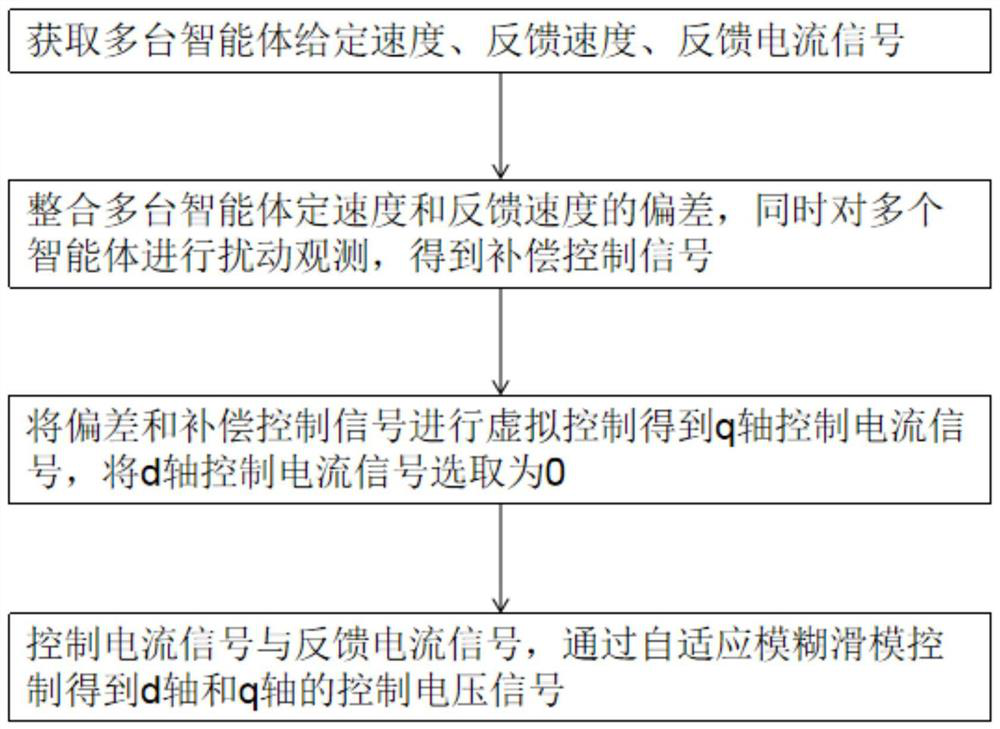
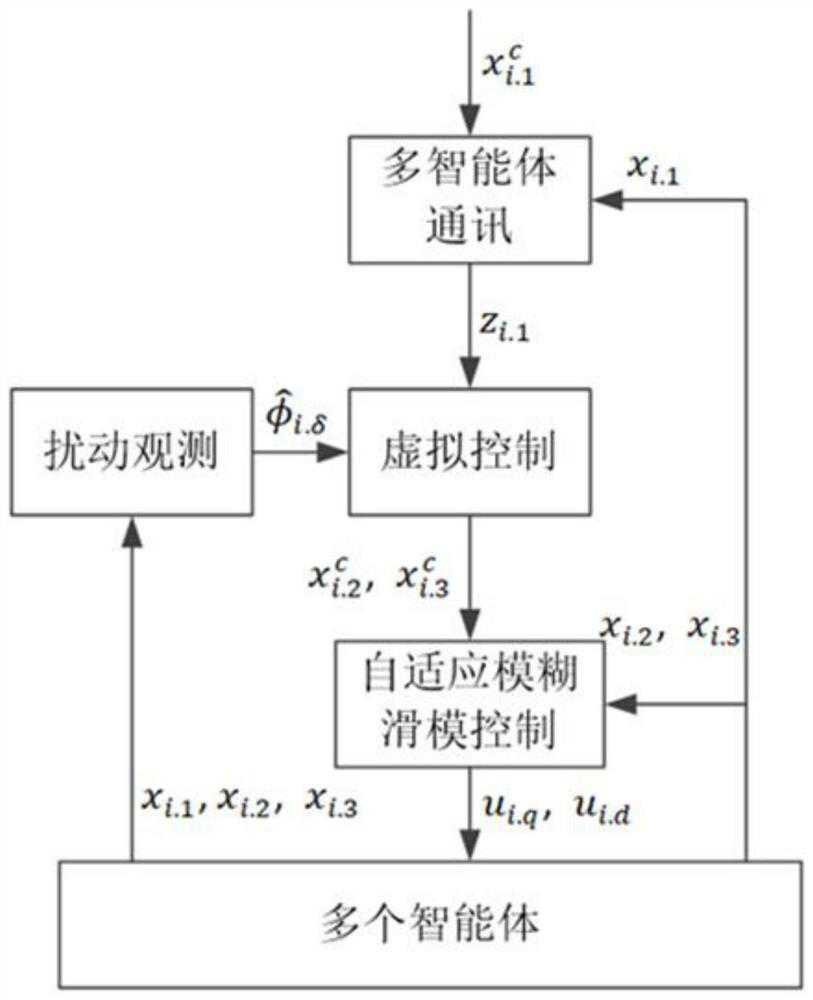
[0028] refer to figure 1 and figure 2 As shown, the multi-agent-based anti-interference adaptive fuzzy sliding mode cooperative control method of the present invention includes the following steps: S1. Obtain a given speed of multiple agents Feedback speed χ i.1 , feedback current signal χ i.2 and χ i.3 ;S2, integrate multiple agents to give speed and feedback speed χ i.1 deviation z i.1 , perform disturbance observations on multiple agents at the same time, and obtain compensation control signals S3, set the deviation z i.1 and compensation control signal Perform virtual control to obtain q-axis control current signal The d-axis control current signal Select 0; S4, c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More