Anti-interference self-adaptive fuzzy sliding mode cooperative control method based on multiple agents
An adaptive fuzzy, multi-agent technology, which is applied in the direction of motor speed or torque control, control system, control generator, etc., can solve problems such as mutual interference between agents and control accuracy errors of multiple agents, and achieve The effect of solving the problem of parameter uncertainty, reducing the influence and simplifying the structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
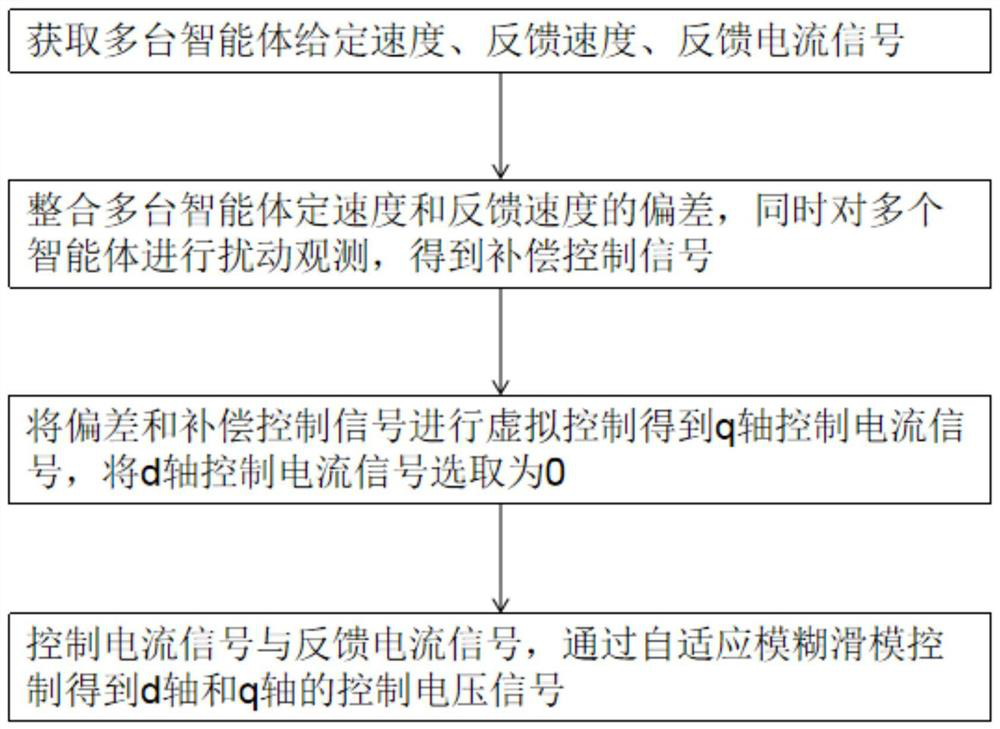
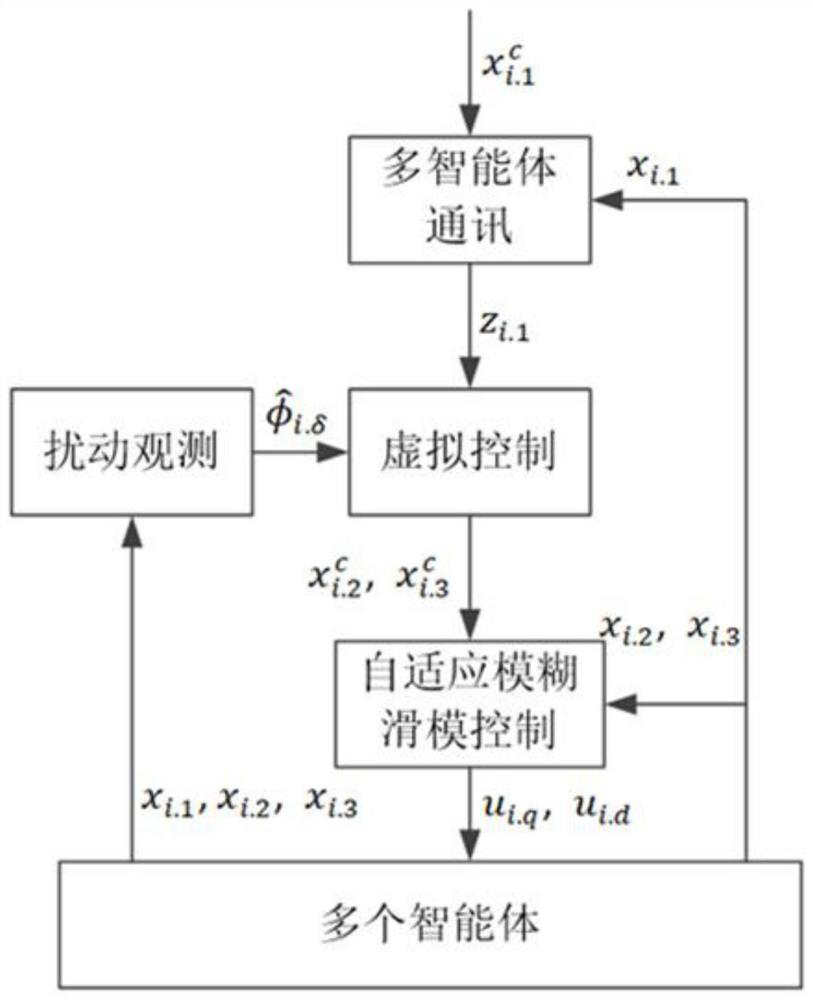
[0028] refer to figure 1 and figure 2 As shown, the multi-agent based anti-jamming self-adaptive fuzzy synovial cooperative control method of the present invention comprises the following steps: S1, obtaining a given speed of multiple intelligent agents Feedback speed χ i.1 , Feedback current signal χ i.2 and χ i.3 ; S2, integrating multiple intelligent bodies to determine the speed and feedback speed χ i.1 The deviation z i.1 , perform disturbance observation on multiple agents at the same time, and obtain the compensation control signal S3, the deviation z i.1 and compensating control signals Perform virtual control to obtain the q-axis control current signal The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com