

Chaotic electromechanical gyroscope system finite time synchronization model and controller design method
A synchronous controller, limited time technology, applied in gyroscope/steering sensing equipment, instruments, gyro effect for speed measurement and other directions, can solve the problems of vibration, damage to the synchronization process of the master-slave electromechanical gyroscope system, and controller discontinuity. , to achieve the effect of reducing the dimension, shortening the synchronization time, and avoiding the destruction of synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0066] see Figure 1-12 , the embodiment of the present invention provides a kind of technical solution: the design method of the finite-time synchronization model of chaotic electromechanical gyroscope system, specifically comprises the following steps:
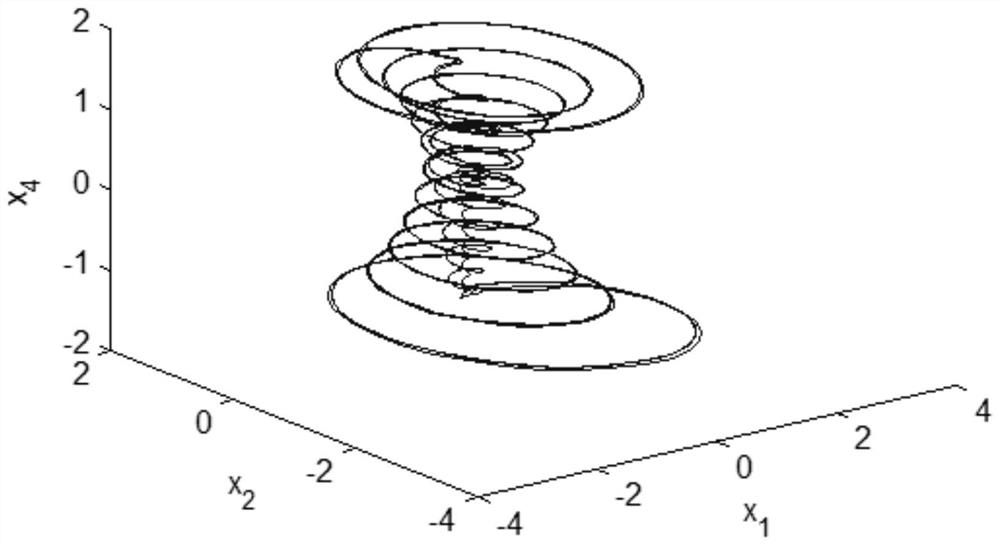
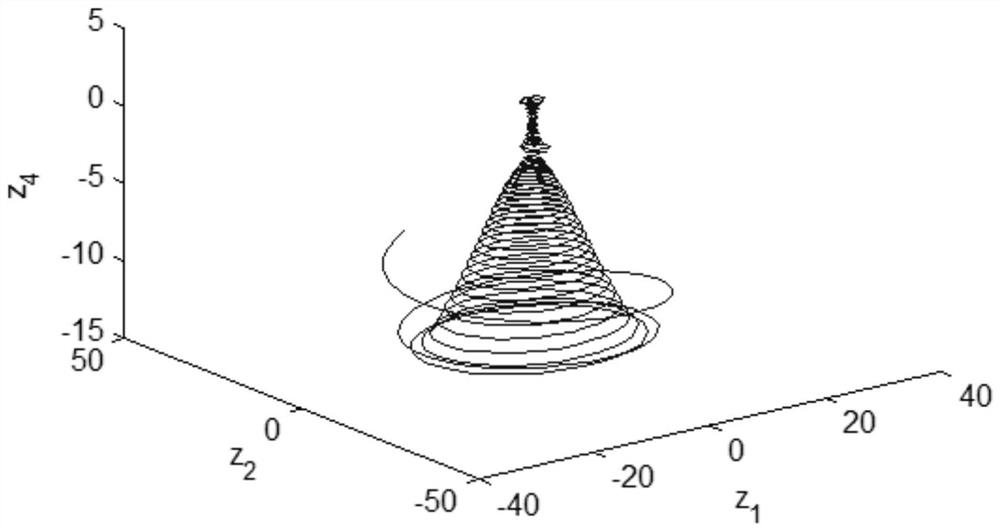
[0067] S1. First construct the electromechanical gyroscope system:
[0068]
[0069] where x∈R 4 ,
[0070]
[0071]
[0072] where all parameters A, B, C, b, f, h i (i=1,2,3),k i (i=1,...,6), ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More