

Rapid automatic leveling control method for multi-point supporting heavy-load platform
A heavy-load platform, automatic leveling technology, applied in non-electric variable control, position/direction control, control/regulation system and other directions, can solve the problems affecting the levelness of the heavy-load platform, poor balance, prolonging the leveling time, etc. Achieve the effect of ensuring stability and wind resistance, increasing wind resistance, and short exercise time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
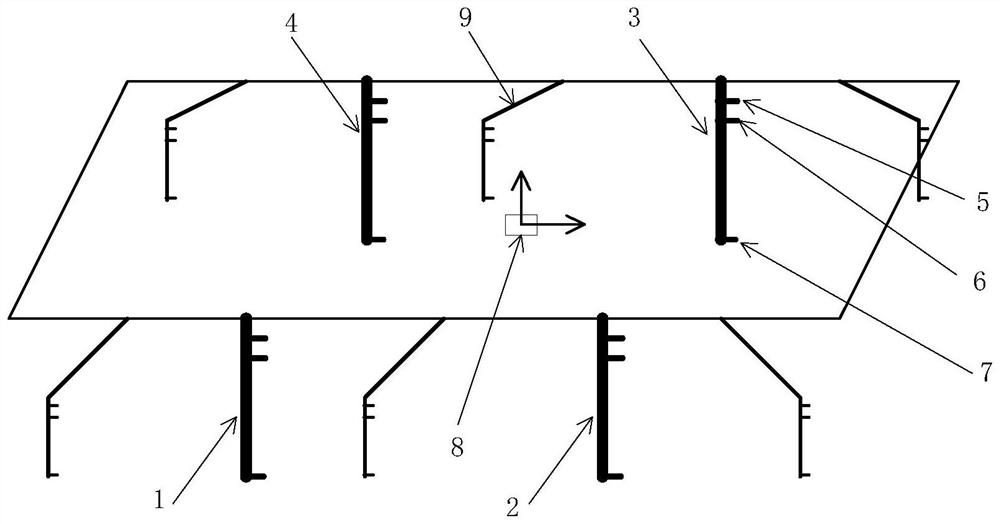
[0015] The support legs of the ten-point support heavy-duty platform based on the present invention are symmetrically distributed on both sides of the heavy-duty platform, wherein the main support legs are installed at four points (two points on the left and right sides) closer to the center of gravity in the working state of the antenna, and the other six support legs To assist the support legs, the auxiliary support legs are installed on six arms, which can be expanded and retracted. After the arms are expanded, the wind resistance performance can be increased and the stability can be improved.
[0016] see figure 1 : The multi-point support heavy-duty platform is mainly composed of four mai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More