

Motion direction change-based candidate seed point cloud single target tracking method
A technology of motion direction and candidate points, applied in the field of 3D point cloud target tracking, can solve the problems of low single target tracking accuracy, neglect of target motion direction, wrong tracking, etc., and achieve the effect of preventing wrong tracking and missed tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
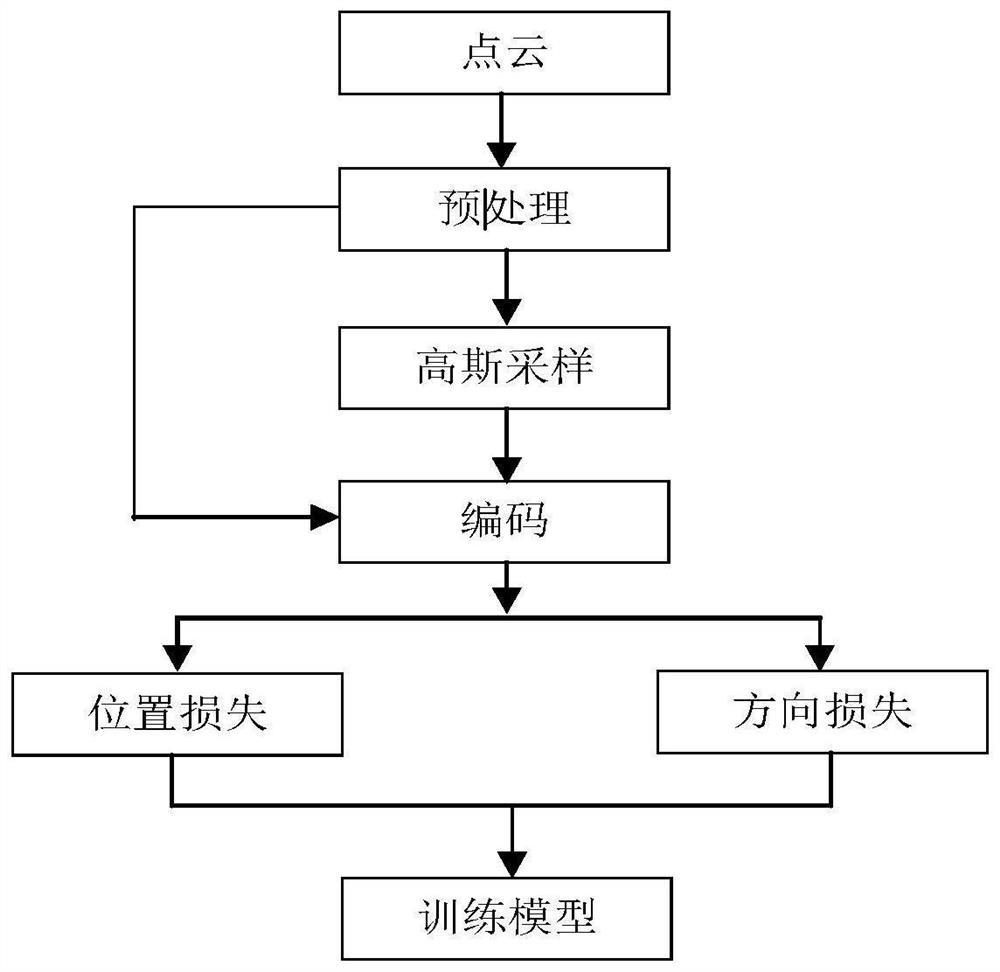
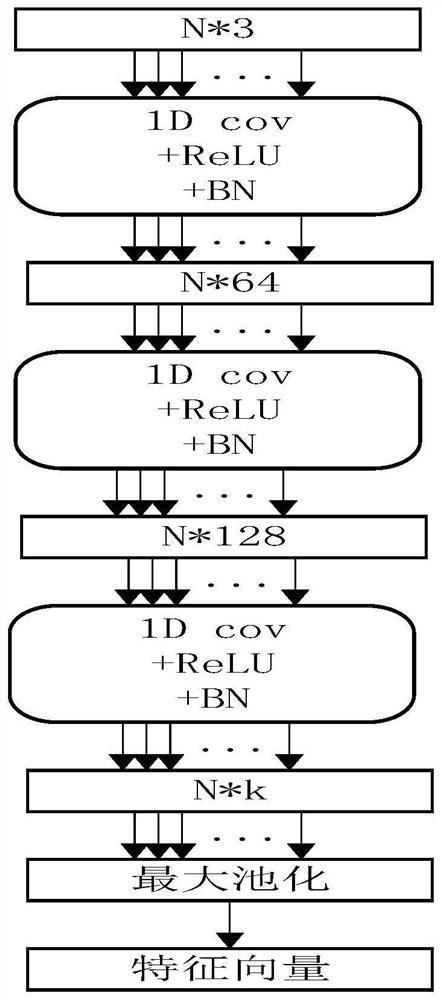
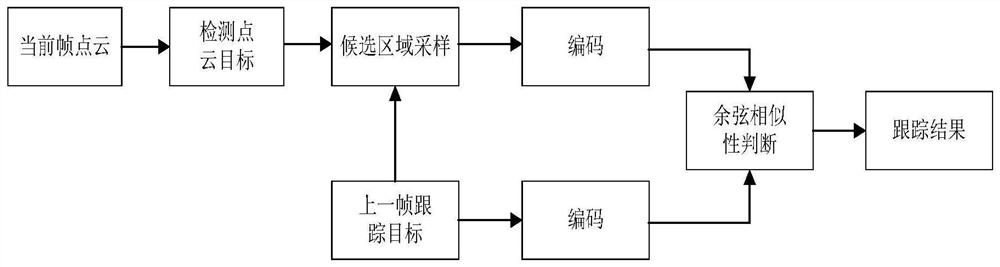
[0042]The present invention is achieved in this way: the method is aimed at 3D point cloud to carry out single target tracking, comprises training module and test module, and training module first obtains template point cloud to point cloud preprocessing, secondly uses Gaussian sampling to obtain candidate point cloud, Input the template point cloud and candidate point cloud into the encoder again for encoding to obtain the corresponding feature vector, and finally calculate the distance loss function and direction loss function and train the entire model. The test module first uses the pre-trained PointRcnn model for target detection, and then performs candidate area sampling, and then inputs the sampled candidate point cloud and the previous frame tracking target point cloud into the trained model for encoding, and finally encodes the encoded ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More