

Automatic multi-finger linkage type manipulator
A technology of manipulators and mechanical claws, which is applied in the field of automatic multi-finger linkage manipulators, can solve problems such as industrial accidents and item damage, and achieve high safety, prolong service life, and reduce friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations.
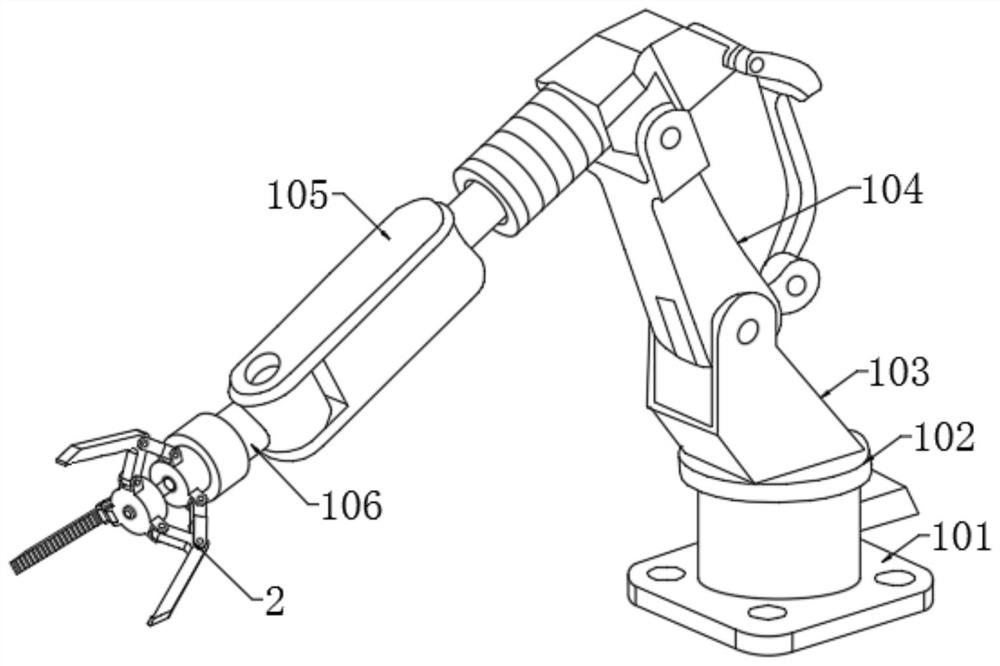
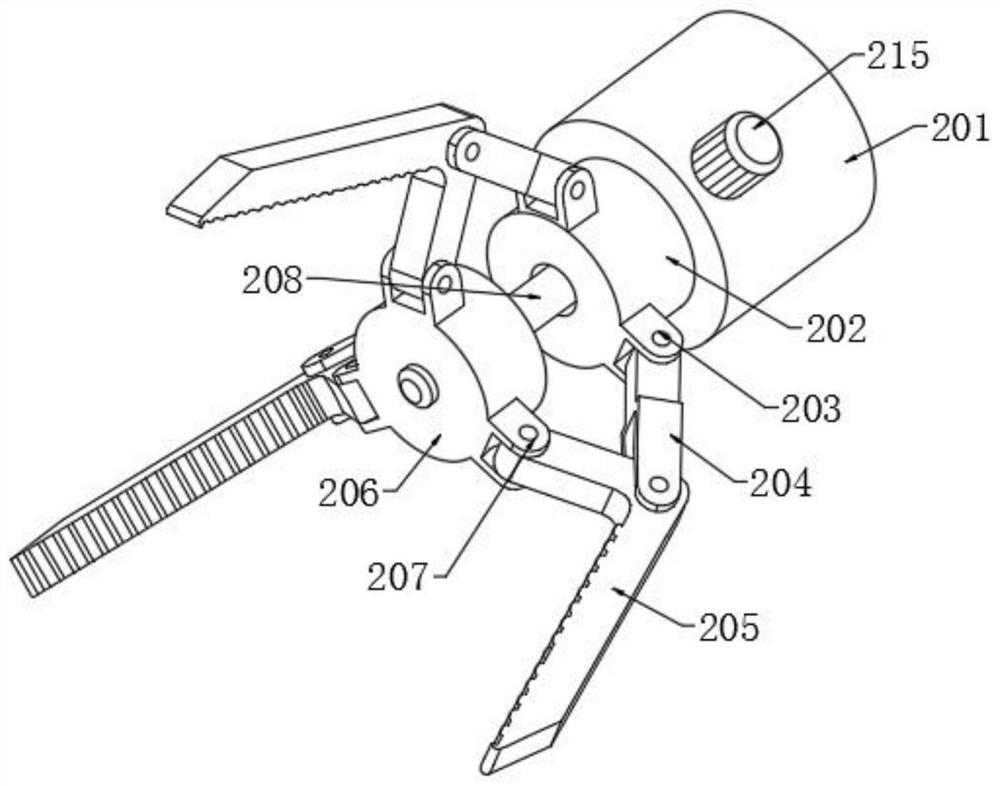
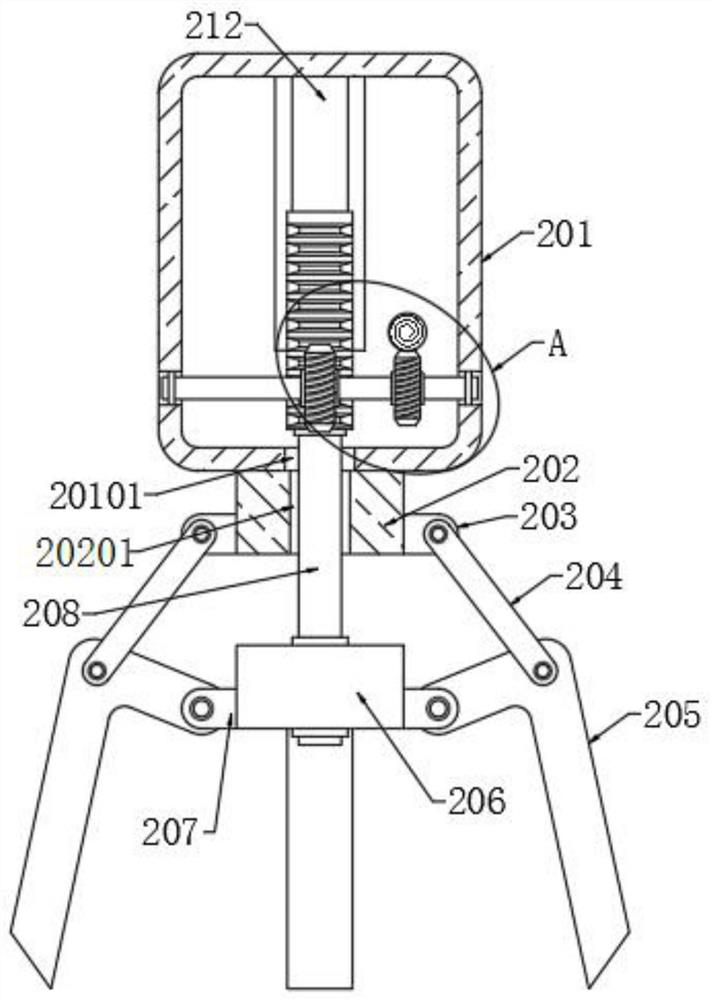
[0033] see Figure 1-7, an automatic multi-finger linkage type manipulator is proposed in this embodiment, including a manipulator and a manipulator 2. The manipulator includes a base 101, a rotating seat 102 is fixedly installed on the base 101, and a fixed Seat 103, on fixed seat 103, main arm 104 is rotated and installed, and slave arm 105 is installed on master arm 104, and rotating firmware 106 is installed on the rotating arm 105, and rotating firmware 106 and mechanical claw 2 are fixedly connected together, The mechanical gripper 2 includes a circular box 201, the top of the circular box 201 is fixedly connected to the rotating fixture 106, the bottom of the circular box 201 is fixedly equipped with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More