Rearview auxiliary system for intelligent driving of automobile
An auxiliary system and intelligent driving technology, applied in the direction of control devices, etc., can solve problems such as difficulty in judging the actual distance, difficulty in driver observation, and easy judgment errors, so as to reduce the possibility of traffic accidents, reduce blind spots in the rear vision, and ensure driving. safe effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
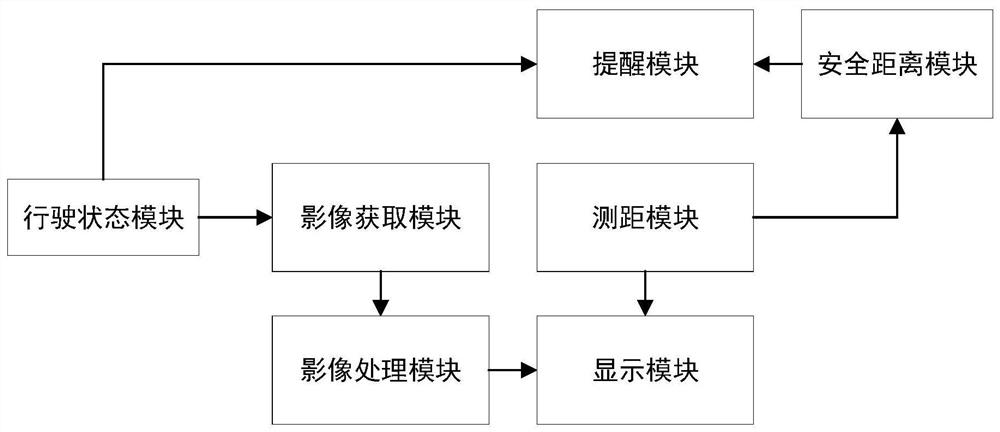
[0044] Embodiment one is basically as attached figure 1 Shown:
[0045] It includes a driving state module, an image acquisition module, an image processing module, a distance measurement module, a display module, a safety distance module and a reminder module.
[0046] The driving state module is used to detect the current driving state of the car. In this embodiment, the current driving state is judged according to the direction of the turning light and the gear position of the car. Lane change; when the right turn signal is activated, the car intends to turn right or change lanes to the right; when in reverse gear, the car intends to reverse. In other embodiments of the present invention, it is also possible to judge the direction in which the car will travel according to the arc of the steering wheel.
[0047] The image acquisition module includes multiple cameras, which are distributed on both sides and the rear of the vehicle body. Specifically, there are two cameras o...
Embodiment 2
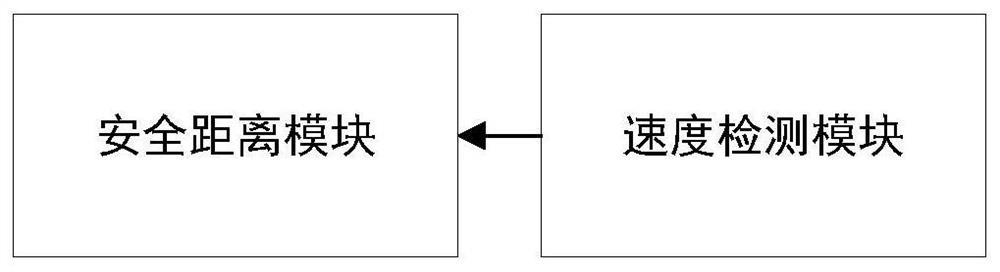
[0055] This example figure 2 As shown, the difference from Embodiment 1 is that it also includes a speed detection module, which detects the current driving speed of the car through GPS technology, and the safety distance module sets the distance threshold through the speed interval according to the current driving speed of the car in this example. When the car speed is below 20km / h, set the distance threshold to 10m; when the car speed is between 20km / h and 40km / h, set the distance threshold to 20m; when the car speed is between 40km / h and 60km / h, set The threshold is 30m, and the distance threshold increases by 10m for every 20km / h increase in vehicle speed.
Embodiment 3
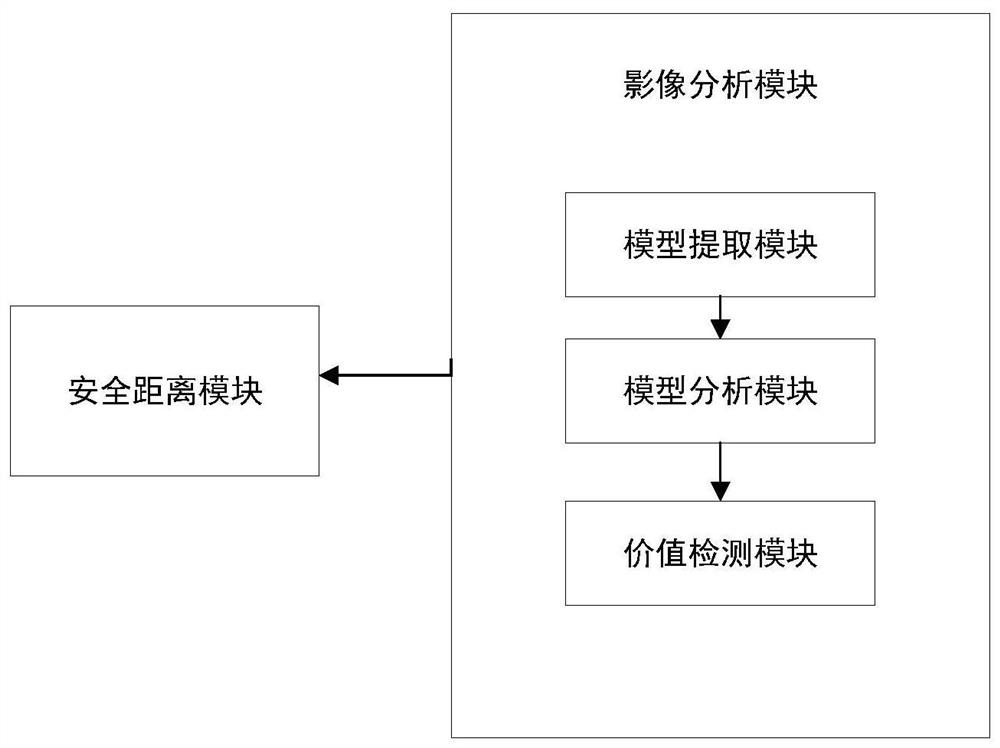
[0057] This implementation is as image 3 As shown, the difference from Embodiment 1 is that an image analysis module is also included, and the image analysis module includes a model extraction module and a model analysis module.
[0058] The model extraction module uses the contour extraction algorithm to extract the edge feature points of the object in the image, and establishes a feature model. The model analysis module compares the feature model with the trained samples in the database to judge whether the object in the image is a pedestrian or a vehicle or other stationary obstacles. When judging that the object is a pedestrian, the set distance threshold is 40m. When judging When the object is a vehicle, set the distance threshold to 30m, and when the object is judged to be a stationary obstacle, set the threshold to 20m.
[0059] In addition, the image analysis module also includes a value detection module. When it is judged that the object is a vehicle, the vehicle lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com