

Three-dimensional point cloud single-stage target detection method for decoupling classification and regression tasks
A 3D point cloud, target detection technology, applied in neural learning methods, instruments, biological neural network models, etc., can solve problems such as accuracy loss, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
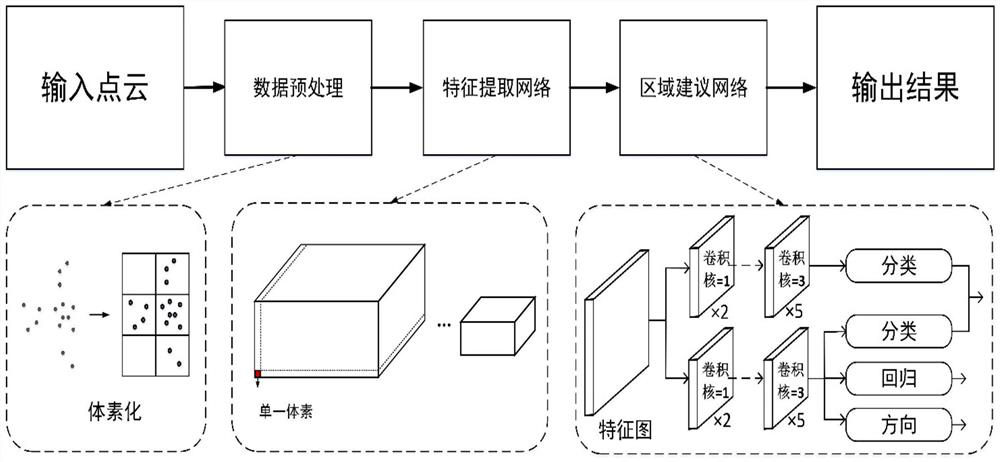
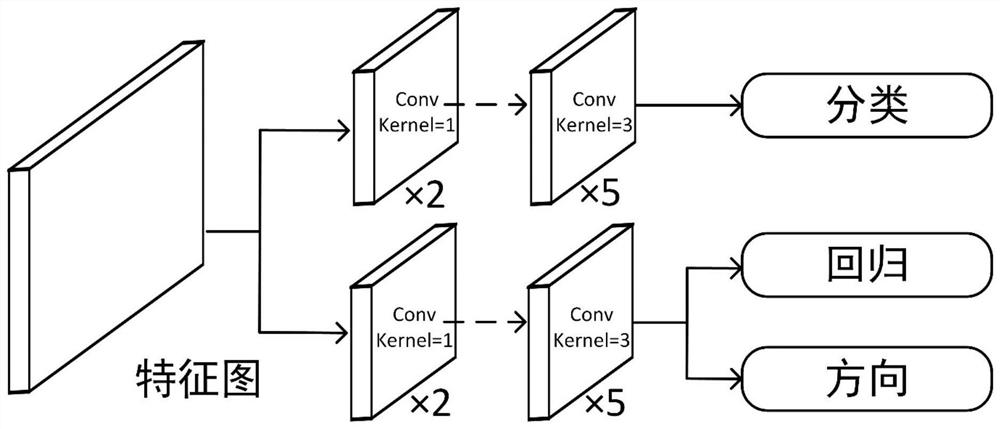
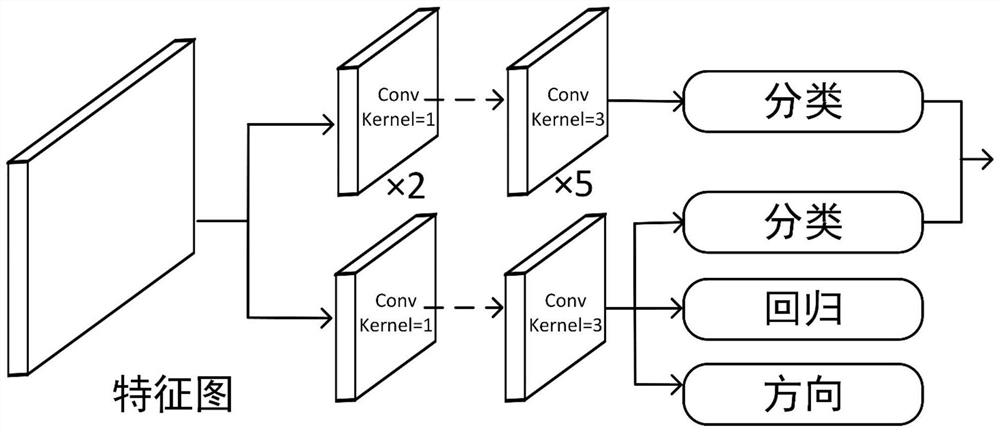
[0024] The present invention improves the traditional single-stage detection region proposal network and can be used to improve the effect of general object detection problems. The main steps are: (1) voxelize the point cloud to make the data from unnecessary point cloud into an ordered grid structure, (2) use 3D sparse convolution to extract the features of the network to obtain high-order Feature map, (3) In the feature map, use a double-headed detector to aggregate features and predict the classification, regression box, and direction of the target. In order to solve the problem of feature entanglement between target detection sub-tasks, the present invention designs a double-headed detection network structure, which can extract the features concerned by classification and regression tasks respectively from high-dimensional features, and pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More