

Detection wall-climbing robot based on negative pressure adsorption
A wall-climbing robot and negative pressure technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of low efficiency and high cost of manual detection methods, and achieve the effect of improving the load-bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
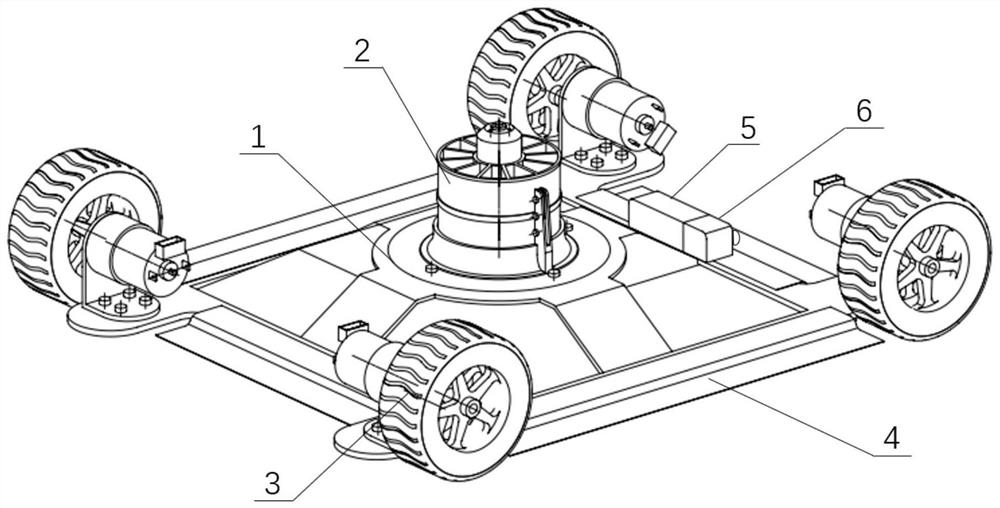
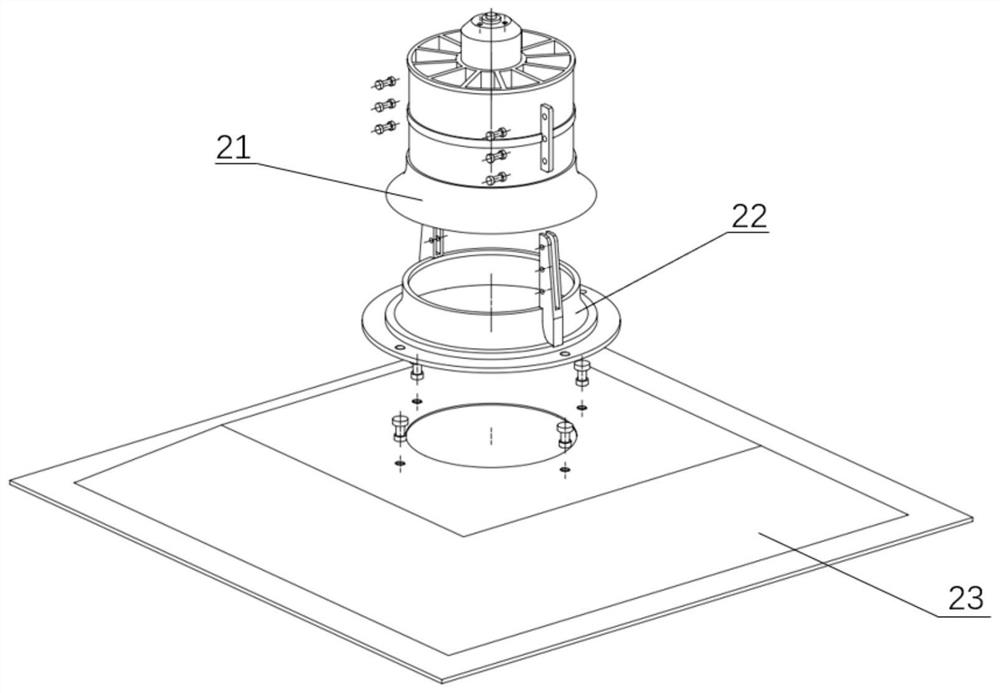
[0038] Such as Figure 1-Figure 11As shown, a negative pressure adsorption detection wall-climbing robot includes a chassis, a negative pressure adsorption generating device 2, a traveling device 3 and a detection device 6, the middle part of the chassis is provided with a hole, and the negative pressure adsorption generating device 2 is connected to the chassis and The hole is covered at the upper end of the hole, a soft sealing device 4 is provided around the lower end of the chassis, a traveling device 3 is provided at four corners of the chassis, and a detection device 6 is also provided on the chassis. The chassis is composed of a chassis connector 1 and a negative pressure chamber 23. The negative pressure adsorption generating device 2 is composed of a ducted fan 21 and a fan connector 22. The height between the chassis connector 1 and the negative pressure chamber 23 is high. At the height of the surroundings, the fan connector 22, the chassis connector 1 and the negat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More