

Calibration method of laser radar and camera
A technology of laser radar and calibration method, which is applied in the field of laser radar and camera calibration, can solve the problems of low calibration accuracy, low precision, and difficult production, and achieve the effect of high labeling accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The calibration method of the lidar and the camera of the present embodiment comprises the following steps:
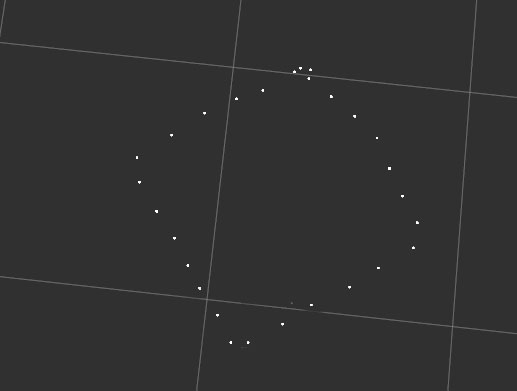
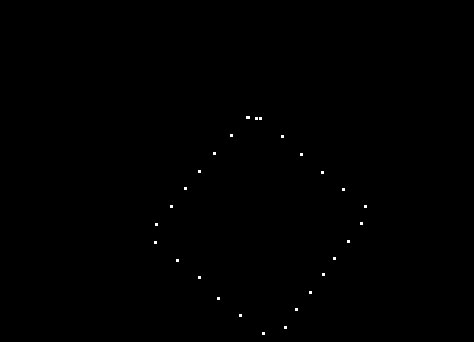
[0027] Step 1, select the calibration board, for example: select the calibration board of 49cm*49cm. Stick the ArUco code on the surface of the calibration board, and fix the calibration board in front of the camera. The ArUco code calibration plate is the most commonly used calibration plate, and the four corner points of the calibration plate can be easily obtained through the ArUco code. When in use, fix the calibration plate, in front of the camera, to ensure that the surrounding area of the calibration plate is relatively open and there are few noises.
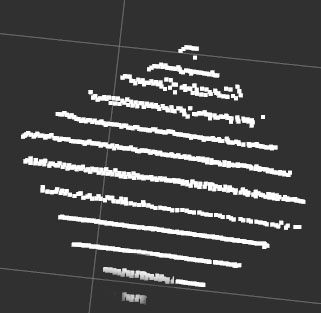
[0028] Step 2: The lidar acquires N frames of point cloud data including the calibration plate, and records the coordinates of each point in each frame of point cloud data and its corresponding ray id. Due to the inherent error of lidar, there will be a slight deviation in each scan for the same positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More