

Large unmanned aerial vehicle remote control real-time transmission processing method
A technology of real-time transmission and processing method, applied in the field of drone remote control, can solve problems such as data loss and delay, and achieve the effect of solving data loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
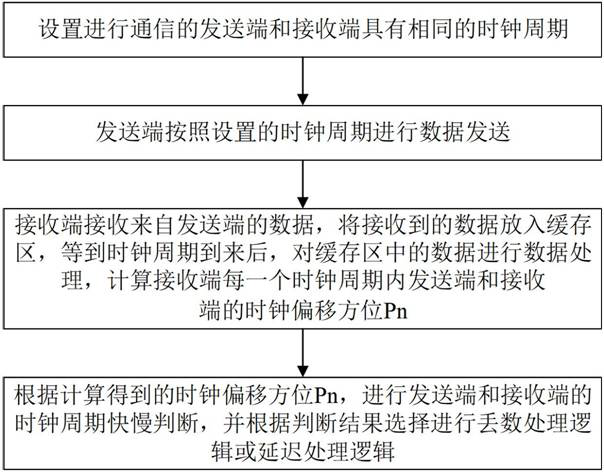
[0045] Such as figure 1 As shown, this embodiment proposes a large UAV remote control real-time transmission processing method, including the following steps:
[0046] Step S1, setting the sending end and the receiving end for communication to have the same clock period;
[0047] Step S2, the sending end sends data according to the set clock cycle;
[0048] Step S3, the receiving end receives the data from the sending end, puts the received data into the buffer area, waits until the clock cycle arrives, performs data processing on the data in the buffer area, and calculates the ratio of the sending end and the receiving end in each clock cycle of the receiving end Clock offset position Pn; in this embodiment, each buffer area established by the receiving end can only store one frame of data;
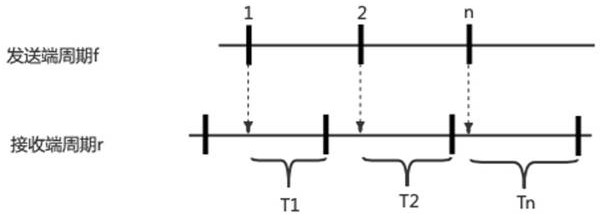
[0049] The method for calculating the clock offset position Pn of the sending end and the receiving end in each clock cycle of the receiving end includes the following sub-steps:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More