Robot shutdown control method and device and robot
A technology of shutdown control and robotics, applied in the field of robotics, can solve problems such as data loss, affecting the life of electronic equipment, and system instability, and achieve the effects of extending service life, protecting electronic hardware, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
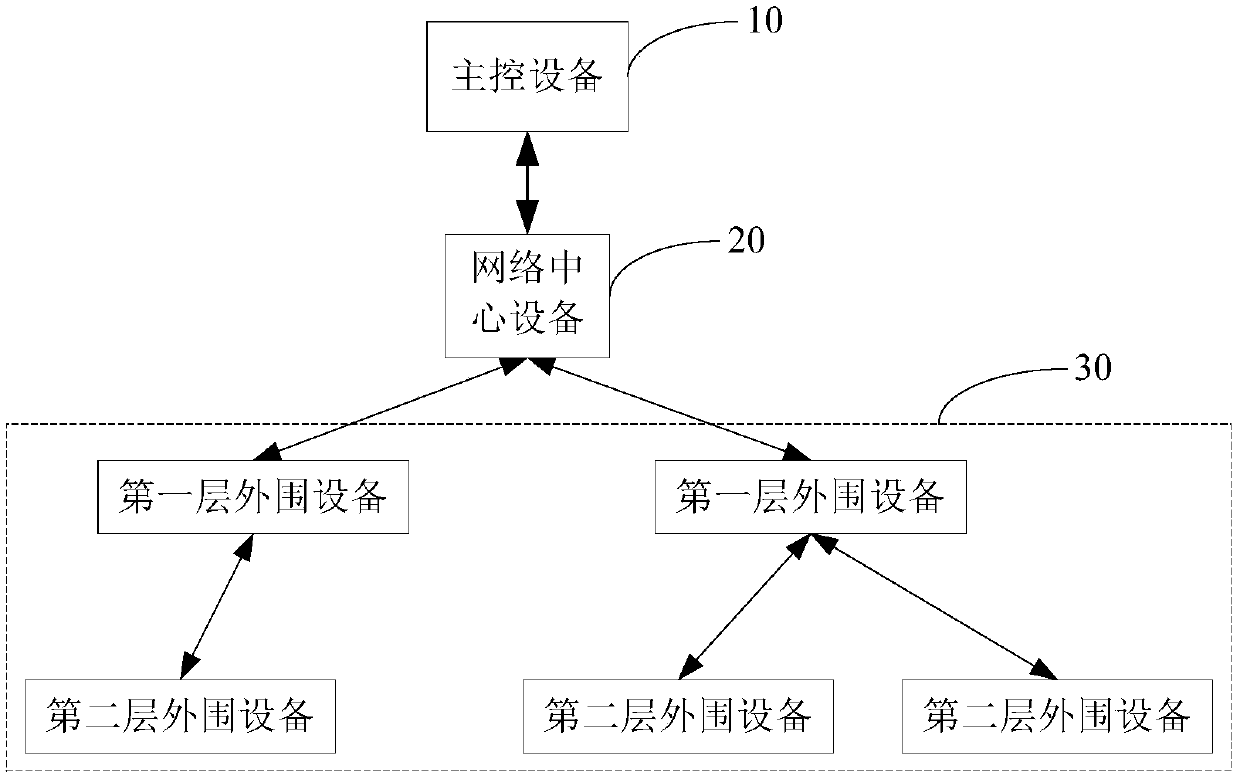
[0043] see figure 1 , is a schematic diagram of the system structure of the application of the robot shutdown control method provided by the embodiment of the present invention. The robot shutdown control method is applied to a robot including peripheral equipment, such as an inspection robot. The robot includes a main control device 10, a network central device 20 and a peripheral device 30; the main control device 10 controls all electronic equipment of the robot, including the peripheral device 30; the peripheral device 30 is communicatively connected with the main control device 10 through the network central device 20; Among them, the robot includes multiple layers of peripheral devices, and each layer includes one or more peripheral devices; the layer of peripheral devices with the closest communication distance with the network center device is the first layer of peripheral devices, and the second layer of peripheral devices communicates with the first layer of peripher...
Embodiment 2
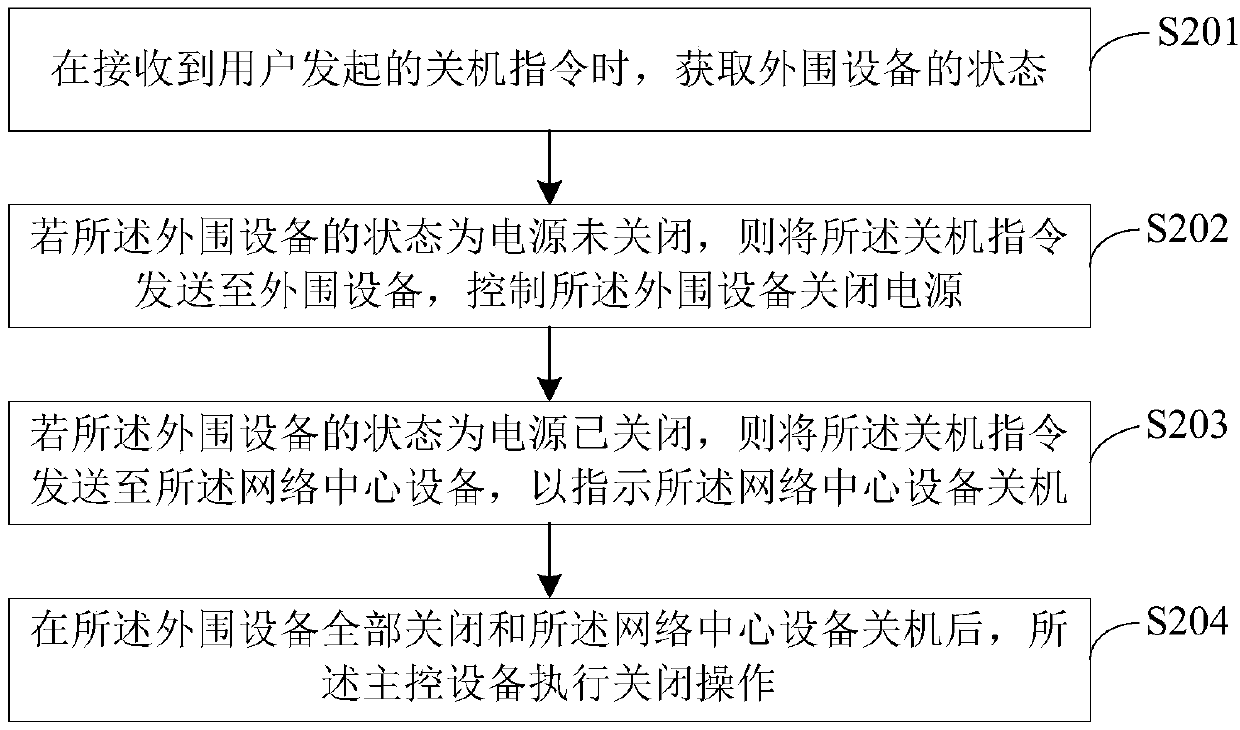
[0045] see figure 2 , is a schematic diagram of the implementation flow of the robot shutdown control method provided by the embodiment of the present invention. The method is applied to a robot, and the robot may be a patrol robot; the robot includes a main control device, a peripheral device, and a network center device; as shown in the figure The method is shown to include the following steps:
[0046]Step S201, when receiving a shutdown command initiated by a user, acquire the status of the peripheral device.
[0047] In this embodiment, the way for the user to initiate the shutdown command may be to start the shutdown program, or to trigger the shutdown button of the robot, but it is not limited to this, and it may also be due to an emergency that causes the shutdown program or operation to generate a corresponding shutdown instruction. When the robot receives the shutdown command, it obtains the status of the peripheral device according to the shutdown command. The st...
Embodiment 3
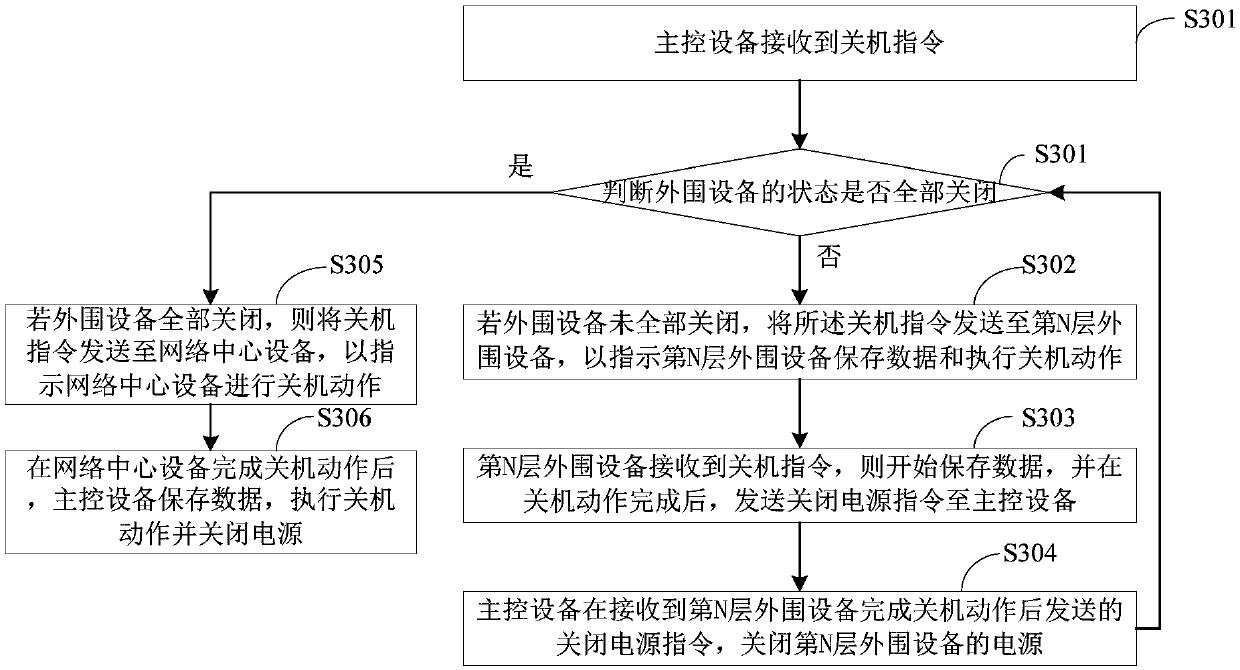
[0067] see image 3 , a schematic diagram of the implementation flow of the robot shutdown control method provided by another embodiment of the present invention. Compared with the previous embodiment, this embodiment more specifically describes the shutdown process of the multi-layer peripheral equipment of the robot in detail, as shown in the figure ,include:
[0068] Step S301, the main control device receives the shutdown command, and judges whether the status of the peripheral devices is all turned off;
[0069] Step S302, if the peripheral devices are not all shut down, send the shutdown command to the peripheral device on the Nth layer to instruct the peripheral device on the Nth layer to save data and perform a shutdown action, wherein N is a positive integer greater than or equal to 1, and the Nth layer Layer Peripherals are the electronic devices at the outermost layer,
[0070] Step S303, the peripheral device on the Nth layer receives the shutdown command, then s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More