Hinge model identification method and robot operation method
An identification method and robot technology, applied in the field of robotics, can solve problems such as poor robot autonomy, damage, and reduced service life of robots or objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0051] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
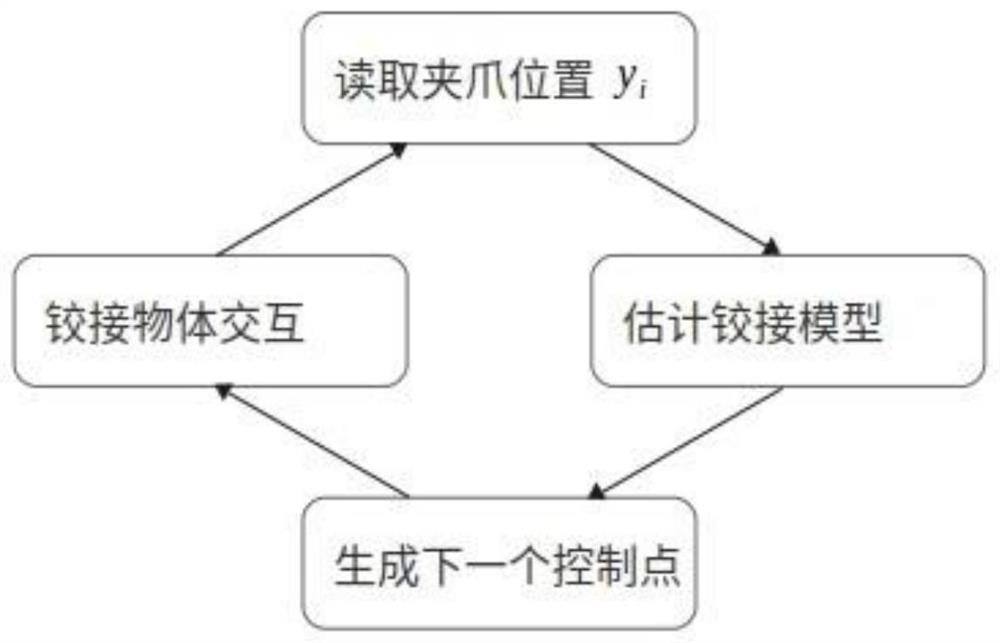
[0052] The research object of the present invention is a service robot with a mobile chassis and a multi-axis mechanical arm. In the home environment, articulated objects usually have operating handles, so it is necessary that the end effector (ie, gripper) of the robot has been grasped by means of machine vision, etc. Holds the handle of the hinged object. figure 1 Identify and operate flowcharts for hinged models, such as figure 1 As shown, the hinge model identification method of the present invention includes the following steps:
[0053](1) The gripper of the robot slowly pulls the handle of the hinged object with a certain force. When the motion starts to end, the robot records the posture y of the gripper at each moment during the process. 1 ,...,y T As sampled data, where y T Indicates the gripper pose at time T, y t ∈SE(3), where ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More