

A method for finite-time hierarchical control of multi-robot systems
A multi-robot, time-limited technology applied in the industrial field to achieve the effect of reducing control costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the objectives, technical solutions and advantages of the present invention clearer, the embodiments of the present invention will be further described below with reference to the accompanying drawings.
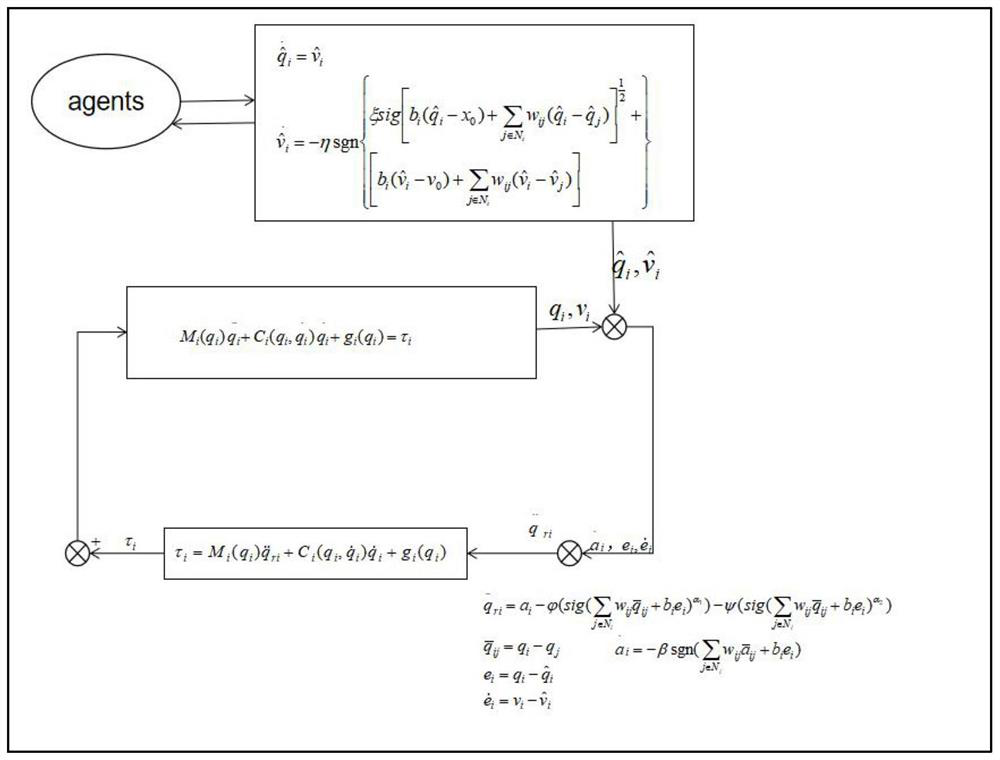
[0021] Please refer to figure 1 , the present invention provides a finite-time hierarchical control method for a multi-robot system, and the limited-time hierarchical control method proposed by the present invention includes an estimation layer controller and a control layer controller;
[0022] The estimation layer controller includes a position estimator and a velocity estimator. Based on the theory of finite-time tracking control, the corresponding estimator is designed to estimate the position and velocity of the leading robot in the multi-robot system in a finite time, and the estimated value is sent to the control layer controller to construct the error function. ;
[0023] The control layer controller includes a sliding mode controller and a t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More