

Constrained agent formation control method based on relative distance measurement
A technology of relative distance and control method, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as the need for a global coordinate system, and achieve saving software and hardware costs and strong practicability , Accurate and reliable effect of the control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative work all belong to the protection scope of the present invention.
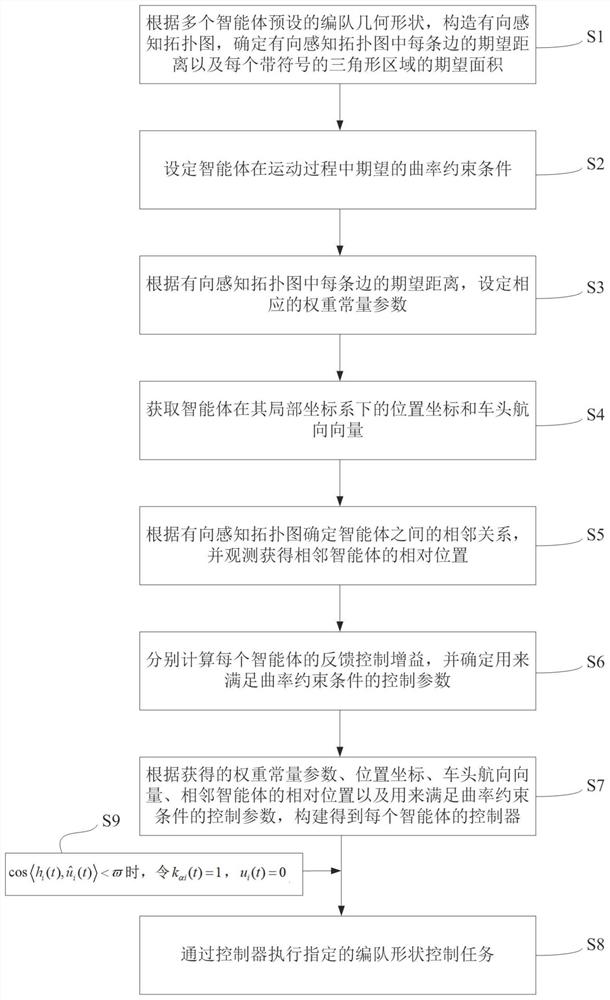
[0063] See attached figure 1 , the embodiment of the present invention discloses a constrained agent formation control method based on relative distance measurement, the method comprising:
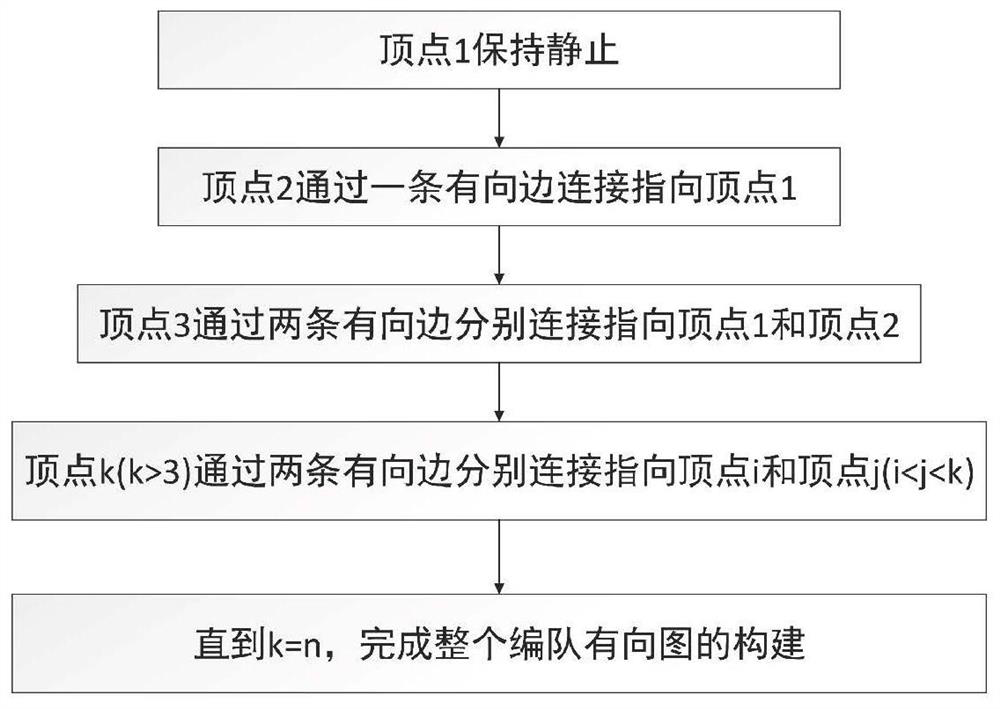
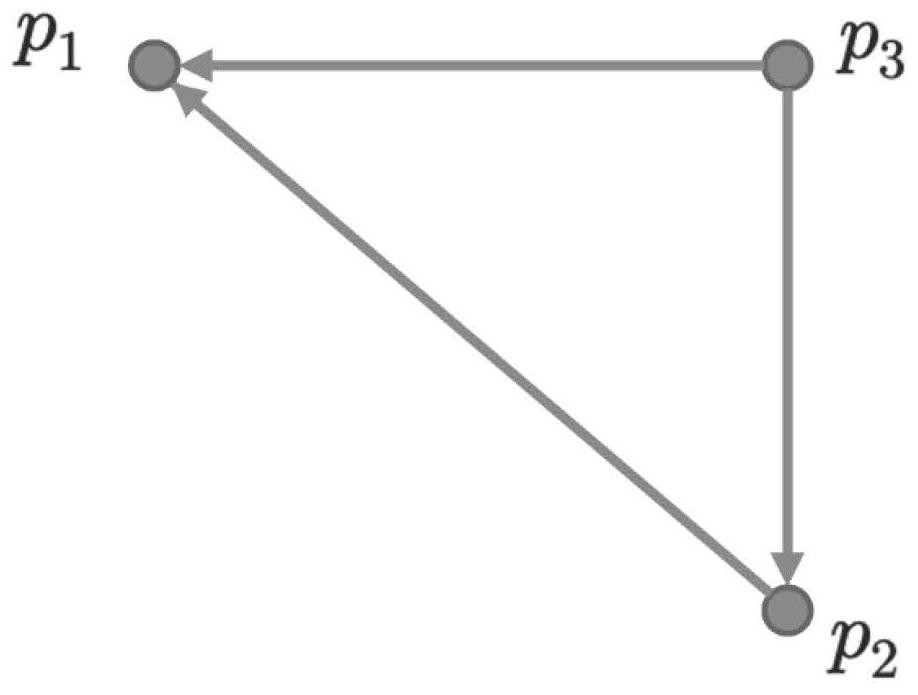
[0064] S1: According to the preset formation geometry of multiple agents, construct a directed perception topology map, and determine the expected distance of each edge in the directed perception topology map and the expected area of each signed triangular area.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More