

Robot joint clamping tool, machining equipment and machining method
A technology of robot joints and clamping tooling, which is applied in the direction of metal processing equipment, clamping devices, metal processing machinery parts, etc., and can solve the problems that cannot be processed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The invention will be described in detail below in conjunction with specific embodiments.
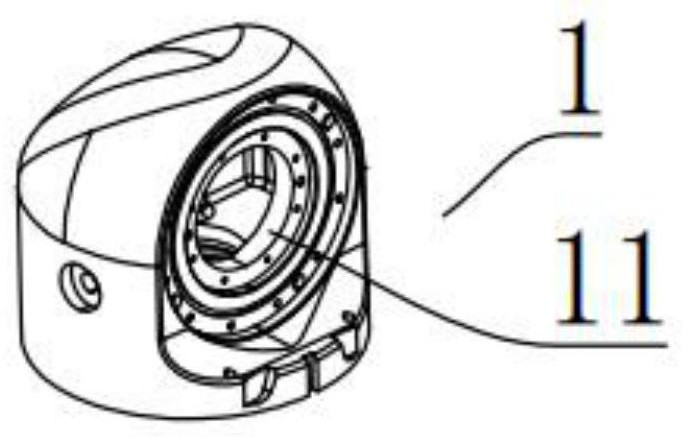
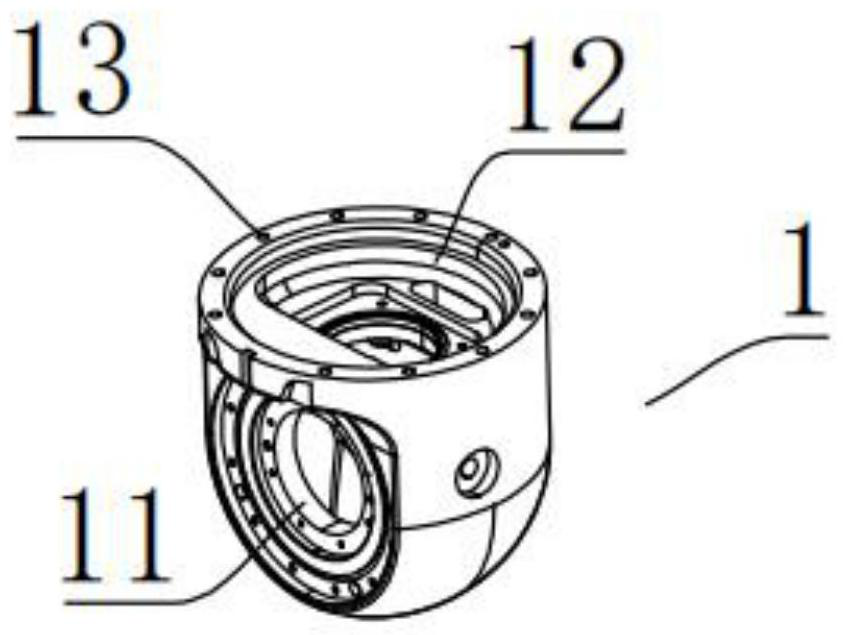
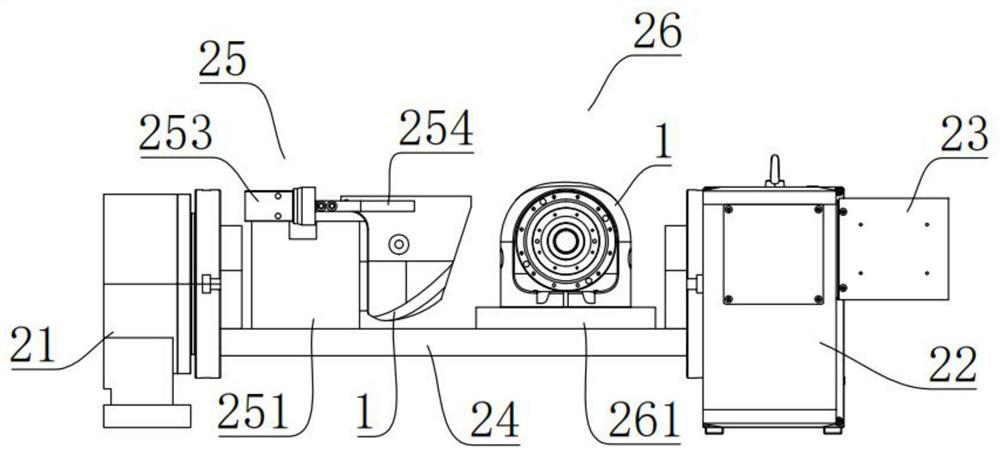
[0026] Such as Figure 3 ~ Figure 6 , is an embodiment of the robot joint clamping tooling of the present invention, specifically:
[0027] A robot joint clamping tool 2, comprising a left bearing seat 21, a right bearing seat 22, a main drive mechanism 23, a mounting plate 24, a left clamping assembly 25 and a right clamping assembly 26; the left bearing seat 21 and the right bearing seat 22 Rotatably connected with the left part and the right part of the mounting plate 24 respectively, the left clamping assembly 25 and the right clamping assembly 26 are respectively connected with the left part and the right part of the mounting plate 24, the left clamping assembly 25 and the right clamping assembly 26 For clamping the workpiece, the left clamping assembly 25 is used to clamp the outer side wall of the workpiece, and the right clamping assembly 26 is used to connect the bottom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More